































Abderahman Rejeb a , Alireza Abdollahi b , Karim Rejeb c , Horst Treiblmaier d,
- a Khoa Quản lý và Luật, Khoa Kinh tế, Đại học Rome Tor Vergata, Via Columbia, 2, Rome 00133, Ý
- b Khoa Quản trị Kinh doanh, Khoa Quản lý, Đại học Kharazmi, 1599964511 Tehran, Iran
- c Khoa Khoa học Bizerte, Đại học Carthage, Zarzouna, 7021 Bizerte, Tunisia
- d Trường Quản lý Quốc tế, Đại học Modul Vienna, Am Kahlenberg 1, 1190 Vienna, Áo
| THÔNG TIN BÀI VIẾT | TÓM TẮT |
| Từ khóa: Các phương tiện bay không người lái UAV Nông nghiệp chính xác Internet of Things trắc lượng thư mục | Máy bay không người lái, còn được gọi là Máy bay không người lái (UAV), đã chứng kiến sự phát triển vượt bậc trong những thập kỷ gần đây. Trong nông nghiệp, họ đã thay đổi tập quán canh tác bằng cách giúp nông dân tiết kiệm đáng kể chi phí, tăng hiệu quả hoạt động và lợi nhuận tốt hơn. Trong những thập kỷ qua, chủ đề về máy bay không người lái trong nông nghiệp đã thu hút được sự quan tâm đặc biệt của giới học thuật. Do đó, chúng tôi tiến hành đánh giá toàn diện dựa trên thư mục để tóm tắt và cấu trúc các tài liệu học thuật hiện có và tiết lộ các xu hướng và điểm nóng nghiên cứu hiện tại. Chúng tôi áp dụng các kỹ thuật đo thư mục và phân tích tài liệu xung quanh máy bay không người lái trong nông nghiệp để tóm tắt và đánh giá các nghiên cứu trước đây Phân tích của chúng tôi chỉ ra rằng viễn thám, nông nghiệp chính xác, học sâu, học máy và Internet vạn vật là những chủ đề quan trọng liên quan đến máy bay không người lái trong nông nghiệp. Đồng trích dẫn phân tích cho thấy sáu cụm nghiên cứu rộng lớn trong tài liệu. Nghiên cứu này là một trong những nỗ lực đầu tiên nhằm tóm tắt nghiên cứu về máy bay không người lái trong nông nghiệp và đề xuất hướng nghiên cứu trong tương lai. |
Giới thiệu
Nông nghiệp đại diện cho nguồn thực phẩm chính của thế giới (Friha và cộng sự, 2021) và đang phải đối mặt với những thách thức nghiêm trọng do
nhu cầu ngày càng tăng về các sản phẩm thực phẩm, các mối lo ngại về an toàn thực phẩm và an ninh cũng như lời kêu gọi bảo vệ môi trường, bảo tồn nguồn nước và
tính bền vững (Inoue, 2020). Sự phát triển này được dự đoán sẽ tiếp tục vì dân số thế giới ước tính đạt 9.7 tỷ người vào năm 2050
(2019). Do nông nghiệp là ví dụ nổi bật nhất về tiêu thụ nước trên toàn cầu nên người ta kỳ vọng rằng nhu cầu lương thực và nước sẽ
tiêu dùng sẽ tăng mạnh trong thời gian tới. Hơn nữa, việc tiêu thụ ngày càng nhiều phân bón và thuốc trừ sâu
cùng với việc tăng cường các hoạt động nông nghiệp có thể dẫn đến những thách thức môi trường trong tương lai. Tương tự như vậy, đất canh tác có hạn và
số lượng nông dân đang giảm trên toàn thế giới. Những thách thức này nhấn mạnh sự cần thiết của các giải pháp canh tác sáng tạo và bền vững (Elijah
và cộng sự, 2018; Friha và cộng sự, 2021; Inoue, 2020; Tzounis và cộng sự, 2017).
Việc kết hợp các công nghệ mới được xác định là một giải pháp đầy hứa hẹn để giải quyết những thách thức này. Nông nghiệp thông minh (Brewster và cộng sự,
2017; Tang và cộng sự, 2021) và nông nghiệp chính xác (Feng và cộng sự, 2019; Khanna & Kaur, 2019) đã xuất hiện do những cuộc tranh luận như vậy. Các
trước đây là khái niệm chung về việc áp dụng công nghệ thông tin truyền thông (ICT) và các cải tiến tiên tiến khác trong hoạt động nông nghiệp để tăng hiệu suất và hiệu suất (Haque và cộng sự, 2021). Sau này tập trung vào quản lý theo địa điểm cụ thể trong đó đất được chia thành
các bộ phận đồng nhất và mỗi bộ phận nhận được lượng đầu vào nông nghiệp chính xác để tối ưu hóa năng suất cây trồng bằng các công nghệ mới (Feng và cộng sự, 2019; Khanna & Kaur, 2019). Các công nghệ nổi bật đã thu hút sự chú ý của các học giả trong lĩnh vực này bao gồm Mạng cảm biến không dây (WSN) (J. Zheng & Yang, 2018; Y. Zhou và cộng sự, 2016), Internet vạn vật (IoT) (Gill và cộng sự, 2017; He và cộng sự, 2021; Liu và cộng sự, 2019),
các kỹ thuật trí tuệ nhân tạo (AI), bao gồm học máy và học sâu (Liakos và cộng sự, 2018; Parsaeian và cộng sự, 2020; Shadrin và cộng sự,
2019), công nghệ điện toán (Hsu và cộng sự, 2020; Jinbo và cộng sự, 2019; Zamora-Izquierdo và cộng sự, 2019), dữ liệu lớn (Gill và cộng sự, 2017; Tantalaki
và cộng sự, 2019) và blockchain (PW Khan và cộng sự, 2020; Pincheira và cộng sự, 2021).
Ngoài các công nghệ nêu trên, viễn thám còn được coi là công cụ công nghệ có tiềm năng cải tiến cao.
nông nghiệp thông minh và chính xác. Vệ tinh, máy bay do con người điều khiển và máy bay không người lái là những công nghệ viễn thám phổ biến (Tsouros và cộng sự, 2019).
Máy bay không người lái, thường được gọi là Máy bay không người lái (UAV), Hệ thống máy bay không người lái (UAS) và máy bay được điều khiển từ xa, là những loại máy bay không người lái.
tầm quan trọng lớn vì chúng có nhiều ưu điểm so với các công nghệ viễn thám khác. Ví dụ, máy bay không người lái có thể cung cấp
hình ảnh chất lượng cao và độ phân giải cao vào những ngày nhiều mây (Manfreda et al., 2018). Ngoài ra, tính khả dụng và tốc độ truyền tải của chúng tạo nên những yếu tố khác
lợi ích (Radoglou-Grammatikis và cộng sự, 2020). So với máy bay, máy bay không người lái có hiệu quả chi phí cao, dễ thiết lập và bảo trì (Tsouros và cộng sự, 2019). Mặc dù ban đầu được sử dụng chủ yếu cho mục đích quân sự, máy bay không người lái có thể mang lại lợi ích cho nhiều ứng dụng dân sự, chẳng hạn như trong quản lý chuỗi cung ứng (A. Rejeb, Rejeb, và cộng sự, 2021a), vì mục đích nhân đạo (A. Rejeb, Rejeb, và cộng sự, 2021c), nông nghiệp thông minh, khảo sát và lập bản đồ, tài liệu di sản văn hóa, quản lý thiên tai, bảo tồn rừng và động vật hoang dã (Panday, Pratihast, et al., 2020). Trong nông nghiệp, máy bay không người lái tồn tại nhiều lĩnh vực ứng dụng đa dạng vì chúng có thể được tích hợp với các công nghệ mới, khả năng tính toán và cảm biến tích hợp để hỗ trợ quản lý cây trồng (ví dụ: lập bản đồ, giám sát, tưới tiêu, chẩn đoán cây trồng) (H. Huang và cộng sự, 2021) , giảm thiểu thiên tai, hệ thống cảnh báo sớm, bảo tồn động vật hoang dã và lâm nghiệp (Negash và cộng sự, 2019). Tương tự, máy bay không người lái có thể được sử dụng trong một số hoạt động nông nghiệp, bao gồm theo dõi cây trồng và tăng trưởng, ước tính năng suất, đánh giá căng thẳng về nước cũng như phát hiện cỏ dại, sâu bệnh và dịch bệnh (Inoue, 2020; Panday, Pratihast, et al., 2020). Máy bay không người lái không chỉ có thể được sử dụng cho mục đích giám sát, ước tính và phát hiện dựa trên dữ liệu cảm quan mà còn để tưới tiêu chính xác và quản lý cỏ dại, sâu bệnh và dịch bệnh chính xác. Nói cách khác, máy bay không người lái có thể phun nước và thuốc trừ sâu với số lượng chính xác dựa trên dữ liệu môi trường. Lợi ích của máy bay không người lái trong nông nghiệp được tóm tắt trong Bảng 1.
Lợi ích chính của máy bay không người lái trong nông nghiệp.
| Lợi ích | Người giới thiệu) |
| Tăng cường thời gian và không gian độ phân giải cảm biến | (Gago và cộng sự, 2015; Niu và cộng sự, 2020; Srivastava và cộng sự, 2020) |
| Thúc đẩy nông nghiệp chính xác | (L. Đặng và cộng sự, 2018; Kalischuk và cộng sự, 2019; Maimaitijiang và cộng sự, 2017) |
| Phân loại và khảo sát cây trồng | (Inoue, 2020; Kalischuk và cộng sự, 2019; Lopez- ` Granados và cộng sự, 2016; Maimaitijiang và cộng sự, 2017; Melville và cộng sự, 2019; Moharana & Dutta, 2016) |
| Sử dụng phân bón | (L. Đặng và cộng sự, 2018; Guan và cộng sự, 2019) |
| Giám sát hạn hán | (Fawcett và cộng sự, 2020; Panday, Pratihast và cộng sự, 2020; Sử và cộng sự, 2018) |
| Ước tính sinh khối | (Bendig và cộng sự, 2014) |
| ước tính năng suất | (Inoue, 2020; Panday, Shrestha, và cộng sự, 2020; Tao và cộng sự, 2020) |
| Giảm nhẹ thiên tai | (Negash và cộng sự, 2019) |
| Bảo tồn động vật hoang dã và lâm nghiệp | (Negash và cộng sự, 2019; Panday, Pratihast và cộng sự, 2020) |
| Đánh giá căng thẳng nước | (Inoue, 2020; J. Su, Coombes, và cộng sự, 2018; L. Zhang và cộng sự, 2019) |
| Sâu bệnh, cỏ dại và bệnh tật nhận diện | (Gaˇsparović và cộng sự, 2020; Inoue, 2020; J. Su, Liu, và cộng sự, 2018; X. Zhang và cộng sự, 2019) |
Mặt khác, máy bay không người lái cũng gặp phải những hạn chế. Sự tham gia của phi công, công suất động cơ, độ ổn định và độ tin cậy, chất lượng của cảm biến do tải trọng
giới hạn về trọng lượng, chi phí thực hiện và quy định hàng không nằm trong số đó (C. Zhang & Kovacs, 2012). Chúng tôi so sánh những thiếu sót
của ba công nghệ viễn thám di động trong Bảng 2. Các công nghệ viễn thám khác, chẳng hạn như cảm biến đất, nằm ngoài trọng tâm của nghiên cứu này.
Những thiếu sót của các công nghệ viễn thám di động khác nhau.
| Viễn thám công nghệ | Thiếu sót | dự án |
| Máy bay không người lái (UAV) | Sự tham gia của phi công; hình ảnh' chất lượng (trung bình); chi phí thực hiện (trung bình); tính ổn định, khả năng cơ động và độ tin cậy; tiêu chuẩn hóa; công suất động cơ; sức mạnh hạn chế nguồn (tuổi thọ pin); thời gian bay hạn chế, va chạm và các cuộc tấn công mạng; giới hạn trọng lượng tải trọng; bộ dữ liệu lớn và xử lý dữ liệu hạn chế khả năng; thiếu quy định; thiếu chuyên môn, đầu vào cao rào cản tiếp cận máy bay không người lái nông nghiệp; | (Bacco và cộng sự, 2018; Dawaliby và cộng sự, 2020; Hardin & Hardin, 2010; Hardin & Jensen, 2011; Lagkas và cộng sự, 2018; Laliberte và cộng sự, 2007; Laliberte & Rango, 2011; Manfreda và cộng sự, 2018, 2018; Nebiker và cộng sự, 2008; Puri và cộng sự, 2017; Velusamy và cộng sự, 2022; C. Zhang & Kovacs, 2012) |
| Truyền hình vệ tinh | Phủ sóng vệ tinh định kỳ, độ phân giải quang phổ hạn chế; lỗ hổng đối với các vấn đề về khả năng hiển thị (ví dụ: mây); Không có sẵn và tốc độ truyền thấp; định hướng và họa tiết ảnh hưởng đến dữ liệu không gian tốn kém bộ sưu tập; truyền dữ liệu chậm thời gian đến với người dùng cuối | (Aboutalebi và cộng sự, 2019; Cen và cộng sự, 2019; Chen và cộng sự, 2019; Nansen & Elliott, 2016; Panday, Pratihast, và cộng sự, 2020; Sai Vineeth và cộng sự, 2019) |
| Phi cơ | Chi phí áp dụng cao; thiết lập phức tạp; chi phí bảo trì; không có nguồn đáng tin cậy máy bay, hình học của hình ảnh; dữ liệu không thường xuyên sự mua lại; thiếu tính linh hoạt; tai nạn chết người; dữ liệu cảm biến biến thể do rung động; vấn đề về tham chiếu địa lý | (Armstrong và cộng sự, 2011; Atkinson và cộng sự, 2018; Barbedo & Koenigkan, 2018; Kovalev & Voroshilova, 2020; Suomalainen và cộng sự, 2013; Thamm và cộng sự, 2013) |
Là một công nghệ đa ngành, đa mục đích trong nông nghiệp, máy bay không người lái đã được nghiên cứu từ nhiều góc độ khác nhau. Ví dụ: các học giả đã xem xét các ứng dụng của máy bay không người lái trong nông nghiệp (Kulbacki và cộng sự, 2018; Mogili & Deepak, 2018), đóng góp của chúng cho nông nghiệp chính xác (Puri và cộng sự, 2017; Tsouros và cộng sự, 2019), tính bổ sung của chúng với các lĩnh vực khác các công nghệ tiên tiến (Al-Thani và cộng sự, 2020; Dutta & Mitra, 2021; Nayyar và cộng sự, 2020; Saha và cộng sự, 2018) và khả năng nâng cao khả năng điều hướng và cảm biến của chúng (Bareth et al. , 2015; Suomalainen và cộng sự, 2014). Do nghiên cứu về ứng dụng máy bay không người lái trong nông nghiệp đã trở nên phổ biến (Khan và cộng sự, 2021)), nên cần phải tóm tắt các tài liệu còn tồn tại và tiết lộ cấu trúc trí tuệ của lĩnh vực này. Hơn nữa, là một lĩnh vực công nghệ cao với những cải tiến liên tục, cần tiến hành đánh giá có cấu trúc để định kỳ tóm tắt các tài liệu còn tồn tại và xác định những khoảng trống nghiên cứu quan trọng. ĐẾN
Ngày nay, có rất ít đánh giá thảo luận về ứng dụng máy bay không người lái trong lĩnh vực nông nghiệp. Ví dụ, Mogili và Deepak (2018) đã xem xét ngắn gọn ý nghĩa của máy bay không người lái trong việc giám sát cây trồng và phun thuốc trừ sâu. Inoue (2020) tiến hành đánh giá việc sử dụng vệ tinh và máy bay không người lái trong viễn thám trong nông nghiệp. Tác giả khám phá những thách thức công nghệ trong việc áp dụng nông nghiệp thông minh cũng như sự đóng góp của vệ tinh và máy bay không người lái dựa trên các nghiên cứu điển hình và thực tiễn tốt nhất. Tsouros và cộng sự. (2019) tóm tắt các loại máy bay không người lái khác nhau và ứng dụng chính của chúng trong nông nghiệp, nêu bật các phương pháp thu thập và xử lý dữ liệu khác nhau. Gần đây hơn, Aslan et al. (2022) đã tiến hành đánh giá toàn diện các ứng dụng UAV trong hoạt động nông nghiệp và nhấn mạnh tầm quan trọng của việc định vị và lập bản đồ đồng thời cho UAV trong nhà kính. Diaz-Gonzalez và cộng sự. (2022) đã xem xét các nghiên cứu gần đây về năng suất cây trồng dựa trên các kỹ thuật học máy khác nhau và điều khiển từ xa.
các hệ thống cảm biến. Phát hiện của họ chỉ ra rằng UAV rất hữu ích để ước tính các chỉ số đất và hoạt động tốt hơn các hệ thống vệ tinh về độ phân giải không gian, tính tạm thời của thông tin và tính linh hoạt. Basiri và cộng sự. (2022) đã đánh giá toàn diện các cách tiếp cận và phương pháp khác nhau để vượt qua các thách thức về hoạch định đường đi cho máy bay không người lái nhiều cánh quạt trong bối cảnh nông nghiệp chính xác. Hơn nữa, Awais et al. (2022) đã tóm tắt việc áp dụng dữ liệu viễn thám UAV trên cây trồng để ước tính trạng thái nước và đưa ra sự tổng hợp chuyên sâu về khả năng tiềm năng của viễn thám UAV đối với ứng dụng gây căng thẳng cho chất thải. Cuối cùng, Aquilani và cộng sự. (2022) đã xem xét các công nghệ canh tác trước được áp dụng trong các hệ thống chăn nuôi trên đồng cỏ và suy luận rằng viễn thám được kích hoạt bởi UAV là thuận lợi cho việc đánh giá sinh khối và quản lý đàn.
Ngoài ra, những nỗ lực sử dụng UAV trong việc giám sát, theo dõi và tập trung chăn nuôi đã được báo cáo gần đây.
Mặc dù những đánh giá này mang lại những hiểu biết mới và quan trọng, nhưng không có đánh giá toàn diện và cập nhật nào dựa trên trắc lượng thư mục có thể được tìm thấy trong tài liệu, điều này thể hiện lỗ hổng kiến thức rõ ràng. Hơn nữa, người ta đã tuyên bố rằng khi sản phẩm học thuật phát triển trong một lĩnh vực khoa học, điều quan trọng đối với các nhà nghiên cứu là sử dụng các phương pháp đánh giá định lượng để hiểu cấu trúc kiến thức của lĩnh vực đó (Rivera & Pizam, 2015). Tương tự, Ferreira et al. (2014) lập luận rằng khi các lĩnh vực nghiên cứu phát triển và trở nên phức tạp, các học giả nên hướng đến việc thỉnh thoảng hiểu được kiến thức được tạo ra và tích lũy để khám phá những đóng góp mới, nắm bắt các truyền thống và xu hướng nghiên cứu, xác định chủ đề nào được nghiên cứu và đi sâu vào cấu trúc kiến thức của lĩnh vực và hướng nghiên cứu tiềm năng. Trong khi Raparelli và Bajocco (2019) tiến hành phân tích thư mục để kiểm tra lĩnh vực kiến thức của các ứng dụng máy bay không người lái trong nông nghiệp và lâm nghiệp, nghiên cứu của họ chỉ xem xét nghiên cứu học thuật được công bố từ năm 1995 đến năm 2017 và không phản ánh động lực của lĩnh vực đang phát triển nhanh chóng này. Hơn nữa, các tác giả đã không cố gắng xác định những đóng góp có ảnh hưởng nhất trong lĩnh vực này, tập hợp các tài liệu và đánh giá cấu trúc trí tuệ bằng cách sử dụng phân tích đồng trích dẫn. Do đó, cần phải tóm tắt tài liệu để tiết lộ các trọng tâm, xu hướng và điểm nóng nghiên cứu hiện tại.
Để lấp đầy khoảng trống kiến thức này, chúng tôi tận dụng phương pháp định lượng và phương pháp đo lường thư mục nghiêm ngặt để kiểm tra tình trạng nghiên cứu hiện tại về sự giao thoa giữa máy bay không người lái và nông nghiệp. Chúng tôi lập luận rằng nghiên cứu hiện tại có một số đóng góp cho các tài liệu hiện có bằng cách kiểm tra một công nghệ mới nổi rất cần thiết trong nông nghiệp vì nó mang lại tiềm năng to lớn để thay đổi một số khía cạnh trong lĩnh vực này. Nhu cầu phân tích thư mục về máy bay không người lái trong nông nghiệp thậm chí còn được nhận thấy nhiều hơn do kiến thức phân tán và rời rạc về máy bay không người lái trong bối cảnh nông nghiệp. Tương tự, tài liệu liên quan đến máy bay không người lái trong nông nghiệp cần phải được nhóm lại một cách có hệ thống, xem xét các nghiên cứu có ảnh hưởng nhất xây dựng nền tảng cho lĩnh vực nghiên cứu này. Giá trị trong phân tích cũng bao gồm việc làm rõ các chủ đề nghiên cứu chính được trình bày trong tài liệu. Xem xét tiềm năng biến đổi của công nghệ, chúng tôi cho rằng phân tích mạng chuyên sâu mang lại những hiểu biết mới bằng cách xác định các công trình có ảnh hưởng và tiết lộ các chủ đề liên quan đến tiềm năng của máy bay không người lái đối với nông nghiệp.
Vì vậy, chúng tôi cố gắng đạt được các mục tiêu nghiên cứu sau:
- Xác định các ấn phẩm có ảnh hưởng với những đóng góp nổi bật cho ứng dụng máy bay không người lái trong lĩnh vực nông nghiệp.
- Phân cụm tài liệu, xác định trọng tâm nghiên cứu và lập bản đồ các nghiên cứu 'cấu trúc trí tuệ' chính dựa trên sự tương đồng về ngữ nghĩa bằng cách sử dụng phân tích đồng trích dẫn.
- Hiểu biết về sự phát triển của các mối liên kết và mạng lưới trích dẫn theo thời gian giữa các ấn phẩm khác nhau trong lĩnh vực này và xác định các hướng nghiên cứu trong tương lai và các chủ đề nóng.
Phần còn lại của bài viết được cấu trúc như sau: phần 2 trình bày phương pháp và các bước thu thập dữ liệu; phần 3 trình bày kết quả phân tích; và phần 4 thảo luận về những phát hiện và kết luận với những đóng góp, hàm ý nghiên cứu và hướng đi trong tương lai.
Phương pháp luận
Trong nghiên cứu hiện tại này, chúng tôi tiến hành phân tích thư mục để khám phá các ứng dụng của máy bay không người lái trong nông nghiệp. Cách tiếp cận định lượng này cho thấy cấu trúc trí tuệ của lĩnh vực tri thức (Arora & Chakraborty, 2021) và hiện trạng, các chủ đề nóng và hướng nghiên cứu trong tương lai có thể được nghiên cứu bằng cách áp dụng phương pháp này (Kapoor và cộng sự, 2018; Mishra et al. , 2017; A. Rejeb, Rejeb và cộng sự, 2021b; A. Rejeb và cộng sự, 2021d; MA Rejeb và cộng sự, 2020). Nói chung, phân tích trắc lượng thư mục kiểm tra tài liệu hiện có để tóm tắt và khám phá các mô hình ẩn giấu của giao tiếp bằng văn bản và sự phát triển của ngành học dựa trên số liệu thống kê và phương pháp toán học, đồng thời nó áp dụng cho các tập dữ liệu lớn (Pritchard, 1969; Small, 1999; Tahai & Rigsby , 1998). Bằng cách sử dụng trắc lượng thư mục, chúng tôi mong muốn hiểu rõ hơn về các mô hình hiện có và các trọng tâm nghiên cứu đóng góp cho lĩnh vực dựa trên sự tương đồng (Thelwall, 2008). Thư mục trắc lượng cung cấp những hiểu biết mới được hỗ trợ bởi sức mạnh định lượng khách quan của phương pháp luận (Casillas & Acedo, 2007). Nhiều học giả trước đây đã tiến hành nghiên cứu trắc lượng thư mục trong các lĩnh vực liên quan, bao gồm nông nghiệp, viễn thám và chuyển đổi kỹ thuật số (Armenta-Medina và cộng sự, 2020; Bouzembrak và cộng sự, 2019; A. Rejeb, Treiblmaier và cộng sự, 2021; Wamba & Queiroz, 2021; Wang và cộng sự, 2019).
Phân tích trích dẫn
Phân tích trích dẫn cho thấy những hiểu biết khác nhau về một lĩnh vực nghiên cứu nhất định. Trước hết, nó giúp tiết lộ những tác giả và ấn phẩm có ảnh hưởng nhất, đóng góp cho một lĩnh vực nghiên cứu nhất định và tạo ra tác động đáng kể (Gundolf & Filser, 2013). Thứ hai, có thể khám phá được dòng chảy tri thức và mối liên kết giao tiếp giữa các tác giả. Cuối cùng, bằng cách truy tìm mối liên hệ giữa các tác phẩm được trích dẫn và trích dẫn, người ta có thể khám phá những thay đổi và sự phát triển của một miền tri thức theo thời gian (Pournader
và cộng sự, 2020). Số lượng trích dẫn cao của một ấn phẩm phản ánh mức độ phù hợp và đóng góp đáng kể của nó cho lĩnh vực nghiên cứu (Baldi, 1998; Gundolf & Filser, 2013; Marinko, 1998). Phân tích trích dẫn các ấn phẩm cũng giúp xác định các tác phẩm có liên quan và theo dõi mức độ phổ biến cũng như tiến độ của chúng theo thời gian.
Phân tích đồng trích dẫn tài liệu
Phân tích đồng trích dẫn là một phương pháp có giá trị để khám phá mối quan hệ giữa các ấn phẩm và mô tả cấu trúc trí tuệ của một lĩnh vực (Nerur và cộng sự, 2008). Nói cách khác, bằng cách xác định các ấn phẩm được trích dẫn nhiều nhất và mối liên hệ của chúng, phương pháp này nhóm các ấn phẩm thành các cụm nghiên cứu riêng biệt trong đó các ấn phẩm trong một cụm thường xuyên chia sẻ những ý tưởng tương tự (McCain, 1990; Small, 1973). Điều quan trọng cần đề cập là sự tương đồng không có nghĩa là những phát hiện của các ấn phẩm này là
gắn kết và thống nhất với nhau; các ấn phẩm thuộc cùng một cụm do có sự tương đồng về chủ đề nhưng có thể có quan điểm trái ngược nhau.
thu thập và phân tích dữ liệu
Theo phương pháp do White và Griffith (1981) đề xuất, chúng tôi đã thực hiện tìm kiếm toàn diện các bài báo trên tạp chí để bao quát toàn bộ lĩnh vực nghiên cứu về ứng dụng máy bay không người lái trong nông nghiệp, theo đuổi năm bước sau:
- Bước đầu tiên là thu thập dữ liệu. Scopus được chọn là một trong những cơ sở dữ liệu toàn diện và đáng tin cậy nhất với kết quả được chuẩn hóa. Siêu dữ liệu của các ấn phẩm liên quan đến tất cả các ứng dụng máy bay không người lái trong nông nghiệp đã được lấy ra. Sau đó, chúng tôi phân tích các bài viết đã chọn, loại bỏ các bài viết lạc đề khỏi bản phân tích.
- Chúng tôi đã phân tích tài liệu và xác định các từ khóa quan trọng nhất được sử dụng trong lĩnh vực nghiên cứu.
- Bằng cách sử dụng phân tích trích dẫn, chúng tôi đã khám phá mối liên hệ giữa tác giả và tài liệu để khám phá các mẫu trích dẫn cơ bản. Chúng tôi cũng xác định các tác giả và ấn phẩm có ảnh hưởng nhất với những đóng góp đáng kể cho lĩnh vực máy bay không người lái trong nông nghiệp.
- Chúng tôi đã tiến hành phân tích đồng trích dẫn để nhóm các ấn phẩm tương tự thành các cụm.
- Cuối cùng, chúng tôi đã phân tích các kết nối và liên kết giữa các quốc gia, tổ chức và tạp chí để mô tả mạng lưới cộng tác.
Xác định các thuật ngữ tìm kiếm thích hợp
Chúng tôi đã áp dụng các chuỗi tìm kiếm sau để tổng hợp dữ liệu: (máy bay không người lái* HOẶC “máy bay không người lái” HOẶC uav* HOẶC “hệ thống máy bay không người lái” HOẶC ua HOẶC “máy bay điều khiển từ xa”) VÀ (nông nghiệp HOẶC nông nghiệp HOẶC nông nghiệp HOẶC nông dân). Cuộc tìm kiếm được tiến hành vào tháng 2021 năm 2021. Máy bay không người lái có một số tên gọi, bao gồm UAV, UAS và máy bay điều khiển từ xa (Sah và cộng sự, 2021). Các thuật ngữ tìm kiếm cụ thể liên quan đến nông nghiệp được xác định dựa trên nghiên cứu của Abdollahi et al. (1). Để rõ ràng và minh bạch, truy vấn chính xác mà chúng tôi sử dụng được nêu trong Phụ lục 1.6.16. Sau quá trình làm sạch dữ liệu, chúng tôi đã tạo một tệp văn bản sau đó được tải vào BibExcel, một công cụ phổ biến để phân tích trích dẫn và đồng trích dẫn. Công cụ này cũng cung cấp khả năng tương tác đơn giản với phần mềm khác và mang lại mức độ tự do đáng kể trong việc xử lý và phân tích dữ liệu. VOSviewer phiên bản 2009 được sử dụng để trực quan hóa các phát hiện và tạo ra các mạng đo thư mục (Eck & Waltman, 2020). VOSviewer cung cấp một loạt hình ảnh trực quan, đặc biệt để phân tích bản đồ đo thư mục (Geng và cộng sự, 2021). Hơn nữa, nó hỗ trợ cung cấp các kết quả trực quan đơn giản giúp hiểu rõ hơn về kết quả (Abdollahi và cộng sự, 5,085). Áp dụng chuỗi tìm kiếm như đã nêu ở trên, chúng tôi đã thu thập và lưu trữ tất cả các ấn phẩm có liên quan. Kết quả tìm kiếm đầu tiên mang lại tổng cộng 4,700 tài liệu. Để đảm bảo chất lượng của mẫu đã chọn, chỉ các bài báo trên tạp chí được bình duyệt mới được xem xét trong nghiên cứu, dẫn đến việc loại trừ các loại tài liệu khác, chẳng hạn như sách, chương, kỷ yếu hội nghị và ghi chú biên tập. Trong quá trình sàng lọc, các ấn phẩm không liên quan (tức là nằm ngoài phạm vi của công việc này), dư thừa (tức là các bản sao có nguồn gốc từ việc lập chỉ mục kép) và các ấn phẩm không nói tiếng Anh đã được lọc ra. Quá trình này dẫn đến việc đưa XNUMX tài liệu vào phân tích cuối cùng.
Phát hiện và thảo luận
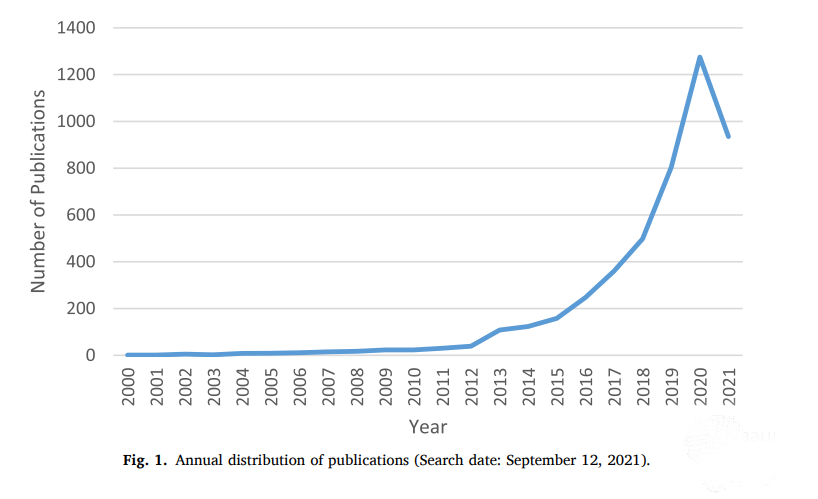
Để bắt đầu, chúng tôi đã phân tích sự phát triển về sản lượng xuất bản trong tài liệu hiện tại về máy bay không người lái trong nông nghiệp. Sự phân bố theo thời gian của nghiên cứu học thuật được thể hiện trong Hình 1. Chúng tôi thấy số lượng xuất bản phẩm tăng nhanh từ năm 2011 (30 ấn phẩm) trở đi; do đó, chúng tôi quyết định chia thời gian phân tích thành hai giai đoạn khác nhau. Chúng tôi coi giai đoạn từ 1990 đến 2010 là giai đoạn xây dựng, có khoảng bảy bài báo được xuất bản hàng năm. Giai đoạn sau năm 2010 được gọi là giai đoạn tăng trưởng vì nghiên cứu về ứng dụng máy bay không người lái trong nông nghiệp chứng kiến sự gia tăng theo cấp số nhân trong giai đoạn này. Sau năm 2010, số lượng ấn phẩm ngày càng tăng khẳng định sự quan tâm ngày càng tăng của các nhà nghiên cứu, điều này cũng phản ánh rằng máy bay không người lái đã được áp dụng cho viễn thám và sử dụng trong nông nghiệp chính xác (Deng và cộng sự, 2018; Maes & Steppe, 2019; Messina & Modica, 2020 ). Cụ thể, số lượng ấn phẩm đã tăng từ 108 vào năm 2013 lên 498 vào năm 2018 và đạt đỉnh 1,275 vào năm 2020. Tổng cộng có 935 bài báo được xuất bản từ tháng 2021 đến giữa tháng XNUMX năm XNUMX. Sau đó, chúng tôi chọn tập trung phân tích nhiều hơn vào giai đoạn tăng trưởng vì giai đoạn này phản ánh sự tinh tế quan trọng và gần đây nhất của máy bay không người lái trong nông nghiệp.
Phân tích từ khóa
Các từ khóa mà tác giả chọn cho một ấn phẩm có tác động quan trọng đến cách trình bày bài báo và cách nó được truyền đạt trong cộng đồng khoa học. Họ xác định các đối tượng chính của nghiên cứu và xác định tiềm năng phát triển hay thất bại của nó (Day & Gastel, 1998.; Kim và cộng sự, 2016; Uddin và cộng sự, 2015). Phân tích từ khóa, một công cụ giúp tiết lộ các xu hướng và hướng nghiên cứu rộng hơn, đề cập đến việc tổng hợp từ khóa của tất cả các ấn phẩm liên quan trong một miền (Dixit & Jakhar, 2021). Trong nghiên cứu hiện tại, chúng tôi chia các từ khóa tổng hợp thành hai nhóm (tức là cho đến năm 2010 và 2011–2021) để khám phá những chủ đề phổ biến nhất. Bằng cách này, chúng tôi có thể theo dõi các từ khóa quan trọng trong cả hai bộ và đảm bảo rằng chúng tôi đã thu thập được tất cả dữ liệu cần thiết. Đối với mỗi bộ, mười từ khóa hàng đầu được trình bày trong Bảng 3. Chúng tôi đã loại bỏ sự không nhất quán bằng cách hợp nhất các từ khóa giống nhau về mặt ngữ nghĩa, chẳng hạn như “máy bay không người lái” và “máy bay không người lái” hoặc tương tự, “Internet of Things” và “IoT”.
Bảng 3 cho thấy “máy bay không người lái” là từ khóa được sử dụng thường xuyên hơn so với “máy bay không người lái” và “hệ thống máy bay không người lái” trong cả hai khoảng thời gian. Ngoài ra, “viễn thám”, “nông nghiệp chính xác” và “nông nghiệp” được xếp hạng cao trong cả hai thời kỳ. Trong giai đoạn đầu tiên, “nông nghiệp chính xác” xếp thứ năm và xếp thứ hai trong giai đoạn thứ hai, điều này minh họa cách máy bay không người lái ngày càng trở nên quan trọng trong việc đạt được nông nghiệp chính xác vì chúng có thể thực hiện giám sát,
thực hành phát hiện và ước tính nhanh hơn, rẻ hơn và dễ thực hiện hơn so với các hệ thống viễn thám và trên mặt đất khác. Ngoài ra, họ có thể phun lượng đầu vào chính xác (ví dụ: nước hoặc thuốc trừ sâu) khi cần thiết (Guo và cộng sự, 2020; Inoue, 2020; Panday, Pratihast, và cộng sự, 2020).
Danh sách các từ khóa được sử dụng thường xuyên nhất.
Cấp | 1990-2010 | số xảy ra | 2011-2021 | số xảy ra |
| 1 | máy bay không người lái xe | 28 | không người lái máy bay | 1628 |
| 2 | viễn thám | 7 | chính xác nông nghiệp | 489 |
| 3 | nông nghiệp | 4 | viễn thám | 399 |
| 4 | trên không | 4 | làm biếng | 374 |
| 5 | chính xác nông nghiệp | 4 | không người lái hệ thống trên không | 271 |
| 6 | máy bay không người lái | 4 | nông nghiệp | 177 |
| 7 | siêu quang phổ cảm biến | 3 | học kĩ càng | 151 |
| 8 | thần kinh nhân tạo mạng | 2 | máy học tập | 149 |
| 9 | chuyến bay tự hành | 2 | thảm thực vật Chỉ số | 142 |
| 10 | cà phê | 2 | Internet của Những điều | 124 |
Một tính năng thú vị khác là sự hiện diện của các công nghệ bổ sung. Trong giai đoạn đầu tiên, “Cảm biến siêu quang” và “mạng lưới thần kinh nhân tạo” (ANN) nằm trong số 10 từ khóa hàng đầu. Hình ảnh siêu phổ đã cách mạng hóa hình ảnh truyền thống bằng cách thu thập một số lượng lớn hình ảnh ở nhiều bước sóng khác nhau. Khi làm như vậy, các cảm biến có thể đồng thời thu thập thông tin không gian và quang phổ tốt hơn so với hình ảnh đa phổ, quang phổ và hình ảnh RGB (Adao ˜ et al.,
2017). Sự xuất hiện của “ANN” trong giai đoạn đầu tiên và “deep learning” (DL) và “machine learning” (ML) trong giai đoạn thứ hai ngụ ý rằng hầu hết các công trình được xuất bản đều tập trung vào việc kiểm tra tiềm năng của các kỹ thuật AI cho máy bay không người lái- dựa vào nông nghiệp. Mặc dù máy bay không người lái có khả năng bay tự động nhưng chúng vẫn cần có sự tham gia của phi công, điều này hàm ý mức độ thông minh của thiết bị thấp. Tuy nhiên, vấn đề này có thể được giải quyết nhờ sự tiến bộ của kỹ thuật AI, có thể cung cấp nhận thức tình huống tốt hơn và hỗ trợ ra quyết định tự động. Được trang bị AI, máy bay không người lái có thể tránh va chạm trong quá trình điều hướng, cải thiện việc quản lý đất và cây trồng (Inoue, 2020), đồng thời giảm sức lao động và căng thẳng cho con người (BK Sharma và cộng sự, 2019).
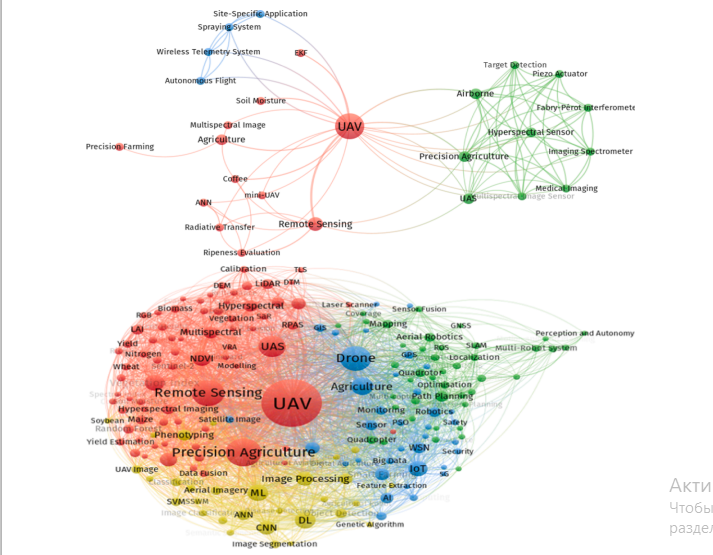
Do tính linh hoạt và khả năng xử lý lượng lớn dữ liệu phi tuyến, kỹ thuật AI là phương pháp phù hợp để phân tích dữ liệu được truyền bởi máy bay không người lái cũng như các hệ thống viễn thám và trên mặt đất khác để dự đoán và ra quyết định (Ali et al., 2015; Inoue, 2020). Hơn nữa, sự hiện diện của “IoT” trong giai đoạn thứ hai cho thấy vai trò ngày càng tăng của nó trong nông nghiệp. IoT đang cách mạng hóa nông nghiệp bằng cách kết nối các công nghệ khác, bao gồm máy bay không người lái, ML, DL, WSN và dữ liệu lớn. Một trong những lợi ích chính của việc triển khai IoT là khả năng hợp nhất các nhiệm vụ khác nhau một cách hiệu quả và hiệu quả (thu thập dữ liệu, phân tích và xử lý dữ liệu, ra quyết định và triển khai) trong thời gian gần thực (Elijah et al., 2018; Feng et al. , 2019; Muangprathub và cộng sự, 2019). Hơn nữa, máy bay không người lái được coi là công cụ hiệu quả để thu thập dữ liệu cần thiết để tính toán sức sống và đặc tính của thảm thực vật (Candiago và cộng sự, 2015). Hình 2a và 2b minh họa các mạng xuất hiện từ khóa trong cả hai khoảng thời gian.
tác giả có ảnh hưởng
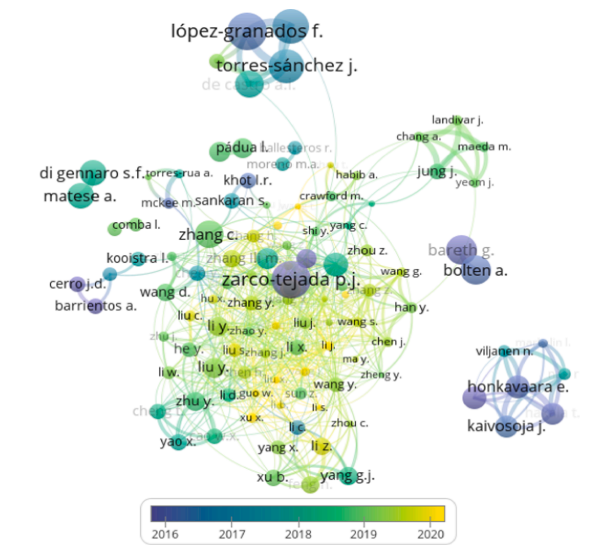
Trong phần này, chúng tôi xác định các tác giả có ảnh hưởng và kiểm tra xem mạng lưới trích dẫn tác giả có thể hình dung và tổ chức tài liệu hiện tại như thế nào. Hình 3 thể hiện thứ tự thời gian của tất cả các nhà nghiên cứu có số lượng trích dẫn cao nhất. Thang màu phản ánh sự thay đổi theo năm trong trích dẫn của tác giả. Chúng tôi kiểm tra cấu trúc trích dẫn của các nhà nghiên cứu đã công bố nghiên cứu về máy bay không người lái trong nông nghiệp bằng cách sử dụng ngưỡng tối thiểu 50 trích dẫn và XNUMX ấn phẩm. Ra khỏi
12,891 tác giả, chỉ có 115 tác giả đáp ứng điều kiện này. Bảng 4 liệt kê mười tác giả có ảnh hưởng nhất, được sắp xếp theo số lượng trích dẫn tối đa. Lopez-Granados F. dẫn đầu danh sách với 1,963 lượt trích dẫn, tiếp theo là Zarco-Tejada PJ với 1,909 lượt trích dẫn.
Danh sách tác giả được trích dẫn nhiều nhất
| Xếp hạng | Tác giả | Trích dẫn |
| 1 | López-Granados ` F. | 1,963 |
| 2 | Zarco-Tejada PJ | 1,909 |
| 3 | Pena ˜ JM | 1,644 |
| 4 | Torres-S' anchez J. | 1,576 |
| 5 | Fereres E | 1,339 |
| 6 | Remondino F | 1,235 |
| 7 | chốt A | 1,160 |
| 8 | Bareth G | 1,155 |
| 9 | Berni JA | 1,132 |
| 10 | de Castro AI | 1,036 |
Khi nói đến các ấn phẩm riêng lẻ, bài báo của Zhang và Kovacs (2012) là nghiên cứu được trích dẫn nhiều nhất đăng trên tạp chí Precision Agriculture. Trong tài liệu này, các tác giả đã xem xét ứng dụng UAS trong nông nghiệp chính xác. Những phát hiện trong nghiên cứu của họ cho thấy cần phải nâng cao thiết kế nền tảng, sản xuất, tiêu chuẩn hóa quy trình tham chiếu địa lý hình ảnh và quy trình truy xuất thông tin để cung cấp cho nông dân những sản phẩm cuối cùng đáng tin cậy. Ngoài ra, họ khuyên nên thu hút nông dân mạnh mẽ hơn, đặc biệt là trong việc lập kế hoạch đồng ruộng, chụp ảnh cũng như giải thích và phân tích dữ liệu. Điều quan trọng là, nghiên cứu này là một trong những nghiên cứu đầu tiên cho thấy tầm quan trọng của UAV trong việc lập bản đồ hiện trường, lập bản đồ sức sống, đo hàm lượng hóa chất, theo dõi căng thẳng thực vật và đánh giá tác động của phân bón lên sự phát triển của cây trồng. Những thách thức liên quan đến công nghệ còn bao gồm chi phí quá cao, khả năng cảm biến, độ ổn định và độ tin cậy của nền tảng, thiếu tiêu chuẩn hóa và quy trình nhất quán để phân tích lượng dữ liệu khổng lồ.
Phân tích trích dẫn
Phân tích trích dẫn thể hiện nghiên cứu về ảnh hưởng của các bài báo, mặc dù có xu hướng chảy tràn (ví dụ: thiên vị trích dẫn, tự trích dẫn) được coi là một trong những công cụ tiêu chuẩn để đánh giá tác động (Osareh, 1996; A. Rejeb et al., 2022; Sarli và cộng sự, 2010). Các trích dẫn cũng phản ánh tầm quan trọng và sức sống của những đóng góp của các bài báo cho tài liệu về một chủ đề cụ thể (R. Sharma và cộng sự, 2022). Chúng tôi đã tiến hành phân tích trích dẫn để xác định các nghiên cứu có ảnh hưởng nhất về máy bay không người lái trong nông nghiệp và tóm tắt nội dung. Bảng 5 trình bày danh sách 1990 bài báo có ảnh hưởng nhất trong giai đoạn 2010–2011 và 2021–2009. Các bài viết của Berni et al. (2010)b và Austin (1990) được trích dẫn nhiều nhất trong năm 2010 và 831, với lần lượt 498 và 2009 trích dẫn. Berni và cộng sự. (2009)b đã minh họa tiềm năng phát triển các sản phẩm viễn thám định lượng thông qua một máy bay không người lái dựa trên máy bay trực thăng được trang bị các cảm biến hình ảnh đa phổ băng hẹp và nhiệt có giá cả phải chăng. So với các cảm biến trên không có người lái truyền thống, hệ thống UAV chi phí thấp dành cho nông nghiệp có thể đạt được các ước tính tương đương về các thông số lý sinh của cây trồng, nếu không muốn nói là tốt hơn. Chi phí phải chăng và tính linh hoạt trong vận hành, cùng với độ phân giải quang phổ, không gian và thời gian cao có sẵn với thời gian quay vòng nhanh, khiến UAV phù hợp với nhiều ứng dụng yêu cầu quản lý quan trọng về thời gian, bao gồm lập kế hoạch tưới tiêu và canh tác chính xác. Bài báo của Berni et al. (2010)b được đánh giá cao vì nó tích hợp hiệu quả nền tảng cánh quay không người lái và các cảm biến nhiệt và kỹ thuật số với các cơ chế hiệu chuẩn cần thiết cho các ứng dụng nông nghiệp. Ấn phẩm được trích dẫn nhiều thứ hai là cuốn sách của Austin (XNUMX), người đã thảo luận về UAV từ các quan điểm thiết kế, phát triển và triển khai. Trong nông nghiệp, UAV hỗ trợ giám sát cây trồng bằng cách phát hiện sớm bệnh thông qua sự thay đổi màu sắc của cây trồng, tạo điều kiện thuận lợi cho việc gieo hạt và phun thuốc cũng như giám sát và lùa đàn.
Các nghiên cứu của Sullivan et al. (2007), Lumme và cộng sự. (2008), và Gokto ¨ ǧan và cộng sự. (2010) hoàn thành danh sách XNUMX bài viết được trích dẫn nhiều nhất. Những bài viết này minh họa sự phát triển của các hệ thống dựa trên UAV để hỗ trợ nông nghiệp. Họ đưa ra giải pháp cho nhiều vấn đề khác nhau, chẳng hạn như giám sát và quét cây trồng, giám sát và quản lý cỏ dại cũng như hỗ trợ quyết định. Họ cũng đề xuất và thảo luận về khả năng của UAV trong việc tăng hiệu quả lấy mẫu và hỗ trợ nông dân đưa ra ý tưởng chính xác và hiệu quả.
chiến lược trồng trọt. Hai bài báo được viết bởi Berni (Berni và cộng sự, 2009b; Berni và cộng sự, 2009a), nhấn mạnh tác động đáng kể của ông đối với nghiên cứu liên quan đến máy bay không người lái trong nông nghiệp. Bài báo của Zarco-Tejada et al. (2014) là một trong những nghiên cứu tiên phong minh họa nhu cầu sử dụng hình ảnh UAV chi phí thấp trong định lượng chiều cao cây.
Danh sách các ấn phẩm được trích dẫn nhiều nhất.
| Cấp | Từ 1990 để 2010 | Từ 2011 để 2021 | ||
| Tài liệu | Citation | Tài liệu | Citation | |
| 1 | (Berni và cộng sự, 2009b) | 831 | (C. Zhang & Kovacs, 2012) | 967 |
| 2 | (Austin, 2010) | 498 | (Nex & Remondino, 2014) | 893 |
| 3 | (Hunt và cộng sự, 2010) | 331 | (Floreano & Gỗ, 2015) | 552 |
| 4 | (SR Herwitz và cộng sự, 2004) | 285 | (Hossein Motlagh và cộng sự, 2016) | 391 |
| 5 | (CCD Lelong và cộng sự, 2008) | 272 | (Shakhatreh và cộng sự, 2019) | 383 |
| 6 | (Berni và cộng sự, 2009b) | 250 | (Ma và cộng sự, 2017) | 373 |
| 7 | (Grenzdorffer ¨ và cộng sự, 2008) | 198 | (Bendig và cộng sự, 2014) | 360 |
| 8 | (Hrabar và cộng sự, 2005) | 175 | (Zarco-Tejada và cộng sự, 2014) | 347 |
| 9 | (Y. Huang và cộng sự, 2009) | 129 | (Ad˜ ao và cộng sự, 2017) | 335 |
| 10 | (Schmale III và cộng sự, 2008) | 119 | (Honkavaara và cộng sự, 2013a) | 331 |
| 11 | (Abd-Elrahman và cộng sự, 2005) | 79 | (Candiago và cộng sự, 2015) | 327 |
| 12 | (Techy và cộng sự, 2010) | 69 | (Xiang & Tian, 2011) | 307 |
| 13 | (Sullivan và cộng sự, 2007) | 51 | (Matese và cộng sự, 2015) | 303 |
| 14 | (Lumme và cộng sự, 2008) | 42 | (Gago và cộng sự, 2015) | 275 |
| 15 | (Gokto ¨ ǧan và cộng sự, 2010) | 40 | (Aasen và cộng sự, 2015a) | 269 |
Trong giai đoạn thứ hai (2011–2021), nghiên cứu của Zhang và Kovacs (2012) và Nex và Remondino (2014) đã mang lại những công bố được trích dẫn thường xuyên nhất. Zhang và Kovacs (2012) lập luận rằng nông nghiệp chính xác có thể được hưởng lợi từ việc triển khai các kỹ thuật và cảm biến không gian địa lý, chẳng hạn như hệ thống thông tin địa lý, GPS và viễn thám, để nắm bắt các biến thể trên đồng ruộng và xử lý chúng bằng cách sử dụng các chiến lược thay thế. Là người thay đổi cuộc chơi trong nông nghiệp chính xác, việc sử dụng máy bay không người lái đã báo trước một kỷ nguyên mới trong viễn thám, đơn giản hóa việc quan sát trên không, thu thập dữ liệu tăng trưởng cây trồng, điều kiện đất đai và khu vực phun thuốc. Bài đánh giá của Zhang và Kovacs (2012) rất có ý nghĩa vì nó cung cấp những hiểu biết sâu sắc về UAV bằng cách tiết lộ những ứng dụng và thách thức hiện có của các thiết bị này trong giám sát môi trường và nông nghiệp chính xác, chẳng hạn như các hạn chế về nền tảng và camera, thách thức xử lý dữ liệu, sự tham gia của nông dân và các quy định hàng không . Thư hai
nghiên cứu được trích dẫn nhiều nhất từ Nex và Remondino (2014) đã xem xét tính hiện đại của UAV trong việc chụp, xử lý và phân tích hình ảnh trái đất.
Công việc của họ cũng trình bày tổng quan về một số nền tảng, ứng dụng và trường hợp sử dụng UAV, giới thiệu những tiến bộ mới nhất trong xử lý hình ảnh UAV. Trong nông nghiệp, nông dân có thể sử dụng UAV để đưa ra quyết định hiệu quả nhằm tiết kiệm chi phí và thời gian, nhận được hồ sơ thiệt hại nhanh chóng và chính xác cũng như dự đoán các vấn đề có thể xảy ra. Ngược lại với các nền tảng trên không thông thường, UAV có thể cắt giảm chi phí vận hành và giảm bớt nguy cơ tiếp cận ở những địa điểm khắc nghiệt trong khi vẫn duy trì được độ chính xác cao. Bài viết của họ tóm tắt những ưu điểm khác nhau của UAV, đặc biệt là về độ chính xác và độ phân giải.
Trong số 2011 ấn phẩm được trích dẫn nhiều nhất còn lại từ năm 2021 đến năm 2014, chúng tôi nhận thấy sự tập trung nhiều hơn vào nghiên cứu liên quan đến ứng dụng máy bay không người lái trong các sứ mệnh chụp ảnh (Bendig và cộng sự, 2017; Ma và cộng sự, 2014; Zarco-Tejada và cộng sự, 2015) , nông nghiệp chính xác (Candiago và cộng sự, 2013; Honkavaara và cộng sự, 2015a), trồng nho chính xác (Matese và cộng sự, 2015), đánh giá căng thẳng về nước (Gago và cộng sự, 2015) và giám sát thảm thực vật (Aasen et al. , XNUMXa). Trong những năm đầu, các nhà nghiên cứu tập trung
nhiều hơn nữa về phát triển các hệ thống dựa trên UAV chi phí thấp, nhẹ và chính xác cho nông nghiệp; nghiên cứu gần đây hơn đã tập trung nhiều hơn vào việc đánh giá các ứng dụng UAV cho nông nghiệp và khảo sát thực địa. Tóm lại, phân tích này cho thấy rằng các ấn phẩm có ảnh hưởng chủ yếu cung cấp đánh giá về các nghiên cứu trước đây để đánh giá tình trạng khoa học và công nghệ hiện tại của UAV và phát triển hệ thống UAV để hỗ trợ nông nghiệp chính xác. Điều thú vị là chúng tôi không tìm thấy các nghiên cứu sử dụng kinh nghiệm
phương pháp hoặc nghiên cứu trường hợp mô tả, tạo nên lỗ hổng kiến thức đáng kể và đòi hỏi phải nghiên cứu thêm về chủ đề này.
Phân tích đồng trích dẫn
Theo Gmür (2006), phân tích đồng trích dẫn xác định các ấn phẩm tương tự và phân cụm chúng. Việc kiểm tra cẩn thận một cụm có thể tiết lộ một lĩnh vực nghiên cứu chung giữa các ấn phẩm. Chúng tôi điều tra việc đồng trích dẫn tài liệu liên quan đến máy bay không người lái trong nông nghiệp để minh họa các lĩnh vực chủ đề liên quan và phát hiện các mô hình trí tuệ của các ấn phẩm. Về vấn đề này, Small (1973) khuyến nghị sử dụng phân tích trích dẫn để nghiên cứu nghiên cứu có ảnh hưởng và có ảnh hưởng nhất
trong một bộ môn. Để giới hạn bộ này ở những bài báo quan trọng nhất (Goyal & Kumar, 2021), chúng tôi đặt ngưỡng đồng trích dẫn là 25, nghĩa là hai bài báo phải được trích dẫn cùng nhau trong danh sách tham khảo từ 25 ấn phẩm khác nhau trở lên. Việc phân cụm cũng được tiến hành với kích thước cụm tối thiểu là 1 và không có bất kỳ phương pháp nào để hợp nhất các cụm nhỏ hơn với các cụm lớn hơn. Kết quả là sáu cụm được tạo ra dựa trên sự giống nhau về nghiên cứu và cấu trúc trí tuệ của chúng. Bảng 6 cho thấy sự phân bố của các ấn phẩm trong mỗi cụm.
Cụm 1: Cụm này bao gồm 2018 tài liệu được xuất bản sau Các ấn phẩm trong cụm này thảo luận về vai trò của máy bay không người lái trong việc hỗ trợ giám sát môi trường, quản lý cây trồng và quản lý cỏ dại. Ví dụ, Manfreda và cộng sự. (XNUMX) cung cấp cái nhìn tổng quan về nghiên cứu hiện tại và triển khai UAV trong giám sát hệ sinh thái nông nghiệp tự nhiên và cho rằng công nghệ này mang lại tiềm năng to lớn để tăng cường đáng kể việc giám sát môi trường và giảm thiểu
khoảng cách hiện có giữa quan sát thực địa và viễn thám trên không và trên không gian thông thường. Điều này có thể được thực hiện bằng cách cung cấp khả năng mới để cải thiện khả năng truy xuất thời gian và hiểu biết không gian về các khu vực rộng lớn một cách hợp lý. UAV có thể liên tục cảm nhận môi trường và gửi dữ liệu kết quả đến các thực thể thông minh, tập trung/phi tập trung kiểm soát các cảm biến để xác định các vấn đề có thể xảy ra, chẳng hạn như thiếu phát hiện bệnh tật hoặc nước (Padua ` et al., 2017). Adao ‘và cộng sự. (2017) cho rằng UAV là giải pháp lý tưởng để đánh giá các điều kiện của thực vật bằng cách thu thập một lượng lớn dữ liệu thô liên quan đến trạng thái nước, ước tính sinh khối và đánh giá sức sống. Các cảm biến gắn trên UAV cũng có thể được triển khai kịp thời trong điều kiện môi trường thích hợp để cho phép thu thập kịp thời dữ liệu viễn thám (Von Bueren và cộng sự, 2015). Bằng thiết bị bay không người lái, nông dân có thể thực hiện các hoạt động canh tác trong nhà bằng cách thu được số đo từ bất kỳ nơi nào trong không gian ba chiều của môi trường canh tác trong nhà (ví dụ: nhà kính), từ đó đảm bảo kiểm soát khí hậu địa phương và giám sát thực vật (Roldan ′ et al ., 2015). Trong bối cảnh độ chính xác
nông nghiệp, các quyết định quản lý cây trồng đòi hỏi dữ liệu cây trồng chính xác, đáng tin cậy với độ phân giải không gian và thời gian thích hợp (Gebbers & Adamchuk, 2010; Gevaert và cộng sự, 2015; Maes & Steppe, 2019). Vì lý do này, Agüera Vega et al. (2015) đã sử dụng hệ thống cảm biến đa quang phổ gắn trên UAV để thu được hình ảnh về cây hướng dương trong mùa sinh trưởng. Tương tự, Huang và cộng sự. (2009) lưu ý rằng viễn thám dựa trên UAV có thể tạo điều kiện thuận lợi cho việc đo lường cây trồng và đất từ dữ liệu quang phổ được thu thập. Verger và cộng sự. (2014) đã phát triển và thử nghiệm kỹ thuật ước tính chỉ số diện tích xanh (GAI) từ các phép đo phản xạ UAV trong các ứng dụng nông nghiệp chính xác, tập trung vào cây lúa mì và hạt cải dầu. Do đó, máy bay không người lái cung cấp những khả năng mới để truy xuất thông tin trạng thái cây trồng với khả năng xem lại thường xuyên và độ phân giải không gian cao (Dong và cộng sự, 2019; Garzonio và cộng sự, 2017; H. Zheng và cộng sự, 2016).
Tập hợp các ấn phẩm có ảnh hưởng về máy bay không người lái trong nông nghiệp.
| cụm | Chủ đề rộng | dự án |
| 1 | Giám sát môi trường, cây trồng quản lý, quản lý cỏ dại | (Ad˜ ao và cộng sự, 2017; Agüera Vega và cộng sự, 2015; de Castro và cộng sự, 2018; Gomez-Cand ` trên ` et al., 2014; YB Huang và cộng sự, 2013; Khanal và cộng sự, 2017; López-Granados, 2011; Manfreda và cộng sự, 2018; P adua và cộng sự, 2017; Pena ‘và cộng sự, 2013; P'erez-Ortiz và cộng sự, 2015; Rasmussen và cộng sự, 2013, 2016; Torres-S' anchez và cộng sự, 2014; Torres-Sanchez, ` López-Granados, ` & Pena, ‘2015; Verger và cộng sự, 2014; Von Bueren và cộng sự, 2015; C. Trương & Kovacs, 2012) |
| 2 | Kiểu hình từ xa, năng suất ước tính, mô hình bề mặt cây trồng, đếm thực vật | (Bendig và cộng sự, 2013, 2014; Geipel và cộng sự, 2014; Gnadinger ¨ & Schmidhalter, 2017; Haghighattalab và cộng sự, 2016; Holman và cộng sự, 2016; Jin và cộng sự, 2017; W. Li và cộng sự, 2016; Maimaitijiang và cộng sự, 2017; Sankaran và cộng sự, 2015; Schirrmann và cộng sự, 2016; Shi và cộng sự, 2016; Yue và cộng sự, 2017; X. Chu và cộng sự, 2017) |
| 3 | Hình ảnh nhiệt cho nước, hình ảnh đa phổ | (Baluja và cộng sự, 2012; Berni và cộng sự, 2009b; Berni và cộng sự, 2009a ; Canada và cộng sự, 2015; Gago và cộng sự, 2015; Gonzalez-Dugo và cộng sự, 2013, 2014; Grenzdorffer¨ và cộng sự, 2008; khaliq và cộng sự, 2019; Matese và cộng sự, 2015; Ribeiro-Gomes và cộng sự, 2017; Santesteban và cộng sự, 2017; Uto và cộng sự, 2013) |
| 4 | Hình ảnh siêu âm, quang phổ hình ảnh | (Aasen và cộng sự, 2015a; Bareth và cộng sự, 2015; Hakala và cộng sự, 2013; Honkavaara và cộng sự, 2013a; Lucieer và cộng sự, 2014; Saari và cộng sự, 2011; Suomalainen và cộng sự, 2014) |
| 5 | Ứng dụng bản đồ 3D | (Jim'enez-Brenes và cộng sự, 2017; Nex & Remondino, 2014; Salamí và cộng sự, 2014; Torres-S' Anchez, Lopez- ` Granados, Serrano và cộng sự, 2015; Zahawi và cộng sự, 2015; Zarco-Tejada và cộng sự, 2014) |
| 6 | Giám sát nông nghiệp | (SR Herwitz và cộng sự, 2004; Hunt và cộng sự, 2010; CCD Lelong và cộng sự, 2008; Primicerio và cộng sự, 2012; Tương & Thiên, 2011) |
Hơn nữa, máy bay không người lái rất hữu ích cho các nhiệm vụ đầy thách thức trong nông nghiệp, bao gồm cả việc lập bản đồ cỏ dại. Các hình ảnh do thiết bị chụp đã chứng minh tính hữu ích của chúng trong việc phát hiện sớm cỏ dại trên đồng ruộng (de Castro và cộng sự, 2018; Jim'enez-Brenes và cộng sự, 2017; Lam và cộng sự, 2021; Lopez-Granados ` và cộng sự, 2016; Rozenberg và cộng sự, 2021). Về vấn đề này, de Castro et al. (2018) cho rằng việc hợp nhất hình ảnh UAV và Phân tích hình ảnh dựa trên đối tượng (OBIA) đã cho phép các học viên khắc phục vấn đề tự động phát hiện sớm ở cây trồng đồng cỏ đầu mùa, đây là một bước tiến lớn trong nghiên cứu cỏ dại. Tương tự như vậy, Pena ˜ et al. (2013) chỉ ra rằng việc sử dụng hình ảnh có độ phân giải không gian cực cao từ UAV kết hợp với quy trình OBIA giúp tạo ra bản đồ cỏ dại ở những vụ ngô sớm có thể được sử dụng để lập kế hoạch thực hiện các biện pháp kiểm soát cỏ dại trong vụ, một nhiệm vụ vượt quá khả năng của vệ tinh và hình ảnh trên không truyền thống. So với các thuật toán phân loại hình ảnh hoặc phát hiện đối tượng, kỹ thuật phân đoạn ngữ nghĩa có hiệu quả hơn trong các nhiệm vụ lập bản đồ cỏ dại (J. Deng và cộng sự, 2020), do đó cho phép nông dân phát hiện các điều kiện trên đồng ruộng, giảm thiểu tổn thất và cải thiện năng suất trong suốt mùa sinh trưởng (Ramesh và cộng sự, 2020). Phân đoạn ngữ nghĩa dựa trên học sâu cũng có thể cung cấp phép đo chính xác về độ che phủ thực vật từ các hình ảnh chụp từ trên không có độ phân giải cao (Ramesh và cộng sự, 2020; A. Zheng và cộng sự, 2022). Mặc dù có tiềm năng điều khiển từ xa
phân loại pixel cảm biến, kỹ thuật phân đoạn ngữ nghĩa đòi hỏi khả năng tính toán đáng kể và bộ nhớ GPU cực cao (J. Deng và cộng sự, 2020).
Dựa trên học máy và UAV, P'erez-Ortiz et al. (2015) đã đề xuất phương pháp lập bản đồ cỏ dại để cung cấp các chiến lược kiểm soát cỏ dại theo địa điểm cụ thể khi nông dân áp dụng biện pháp kiểm soát cỏ dại sớm sau khi xuất hiện. Cuối cùng, Rasmussen và cộng sự. (2013) nhấn mạnh rằng máy bay không người lái cung cấp cảm biến rẻ tiền với độ phân giải không gian linh hoạt tuyệt vời. Nhìn chung, các ấn phẩm trong cụm này tập trung vào việc khám phá tiềm năng của UAV để hỗ trợ viễn thám, giám sát cây trồng và lập bản đồ cỏ dại. Cần có thêm nghiên cứu chuyên sâu để nghiên cứu sâu hơn về cách ứng dụng máy bay không người lái trong giám sát môi trường, quản lý cây trồng và lập bản đồ cỏ dại có thể đạt được nền nông nghiệp bền vững hơn (Chamuah & Singh, 2019; Islam và cộng sự, 2021; Popescu và cộng sự, 2020; J . Su, Liu, và cộng sự, 2018) và giải quyết các vấn đề quản trị của công nghệ này trong các ứng dụng bảo hiểm mùa màng (Basnet & Bang, 2018; Chamuah & Singh, 2019, 2022; Meinen & Robinson, 2021). Các nhà nghiên cứu nên tập trung vào việc xác nhận các phép đo được thu thập bằng UAV bằng các kỹ thuật xử lý hiệu quả để nâng cao chất lượng cuối cùng của dữ liệu được xử lý (Manfreda và cộng sự, 2018). Hơn nữa, cần phát triển các thuật toán thích hợp để nhận dạng các pixel hiển thị cỏ dại trong hình ảnh kỹ thuật số và loại bỏ nền không liên quan trong quá trình lập bản đồ cỏ dại bằng UAV (Gaˇsparovi’c và cộng sự, 2020; Hamylton và cộng sự, 2020; H. Huang và cộng sự. , 2018, 2020; Lopez- ` Granados và cộng sự, 2016). Nghiên cứu bổ sung về việc áp dụng các kỹ thuật phân đoạn ngữ nghĩa trong nhận dạng thực vật, phân loại lá và lập bản đồ bệnh được hoan nghênh (Fuentes-Pacheco và cộng sự, 2019; Kerkech và cộng sự, 2020).
Cụm 2. Các ấn phẩm trong cụm này tập trung vào một số khía cạnh của máy bay không người lái trong nông nghiệp. Liên quan đến kiểu hình từ xa, Sankaran et al. (2015) đã xem xét tiềm năng của việc sử dụng hình ảnh trên không có độ phân giải cao, độ cao thấp với UAV để xác định nhanh kiểu hình của cây trồng trên đồng ruộng và họ lập luận rằng, so với các nền tảng cảm biến trên mặt đất, các UAV nhỏ có cảm biến phù hợp mang lại một số lợi thế , chẳng hạn như truy cập hiện trường dễ dàng hơn, dữ liệu có độ phân giải cao, thu thập dữ liệu hiệu quả,
đánh giá nhanh chóng các điều kiện tăng trưởng tại hiện trường và chi phí vận hành thấp. Tuy nhiên, các tác giả cũng lưu ý rằng việc áp dụng hiệu quả UAV cho kiểu hình trường phụ thuộc vào hai yếu tố cơ bản là các tính năng của UAV (ví dụ: an toàn, ổn định, định vị, tự chủ) và đặc điểm cảm biến (ví dụ: độ phân giải, trọng lượng, bước sóng quang phổ, trường của quan điểm). Haghighattalab và cộng sự. (2016) đã đề xuất một quy trình xử lý hình ảnh bán tự động để truy xuất dữ liệu ở cấp độ lô từ hình ảnh UAV và đẩy nhanh quá trình nhân giống. Holman và cộng sự. (2016) đã phát triển mức cao
hệ thống kiểu hình trường thông lượng và nhấn mạnh rằng UAV có thể thu thập dữ liệu kiểu hình chất lượng, đồ sộ, dựa trên hiện trường và thiết bị này có hiệu quả đối với các khu vực rộng lớn và trên các địa điểm hiện trường khác nhau.
Vì ước tính năng suất là một thông tin cực kỳ quan trọng, đặc biệt là khi có sẵn đúng thời gian, nên UAV có tiềm năng cung cấp tất cả các phép đo thực địa và thu được dữ liệu chất lượng cao một cách hiệu quả (Daakir và cộng sự, 2017; Demir và cộng sự, 2018). ; Enciso và cộng sự, 2019; Kulbacki và cộng sự, 2018; Về vấn đề này, Jin và cộng sự. (2012) đã tận dụng hình ảnh có độ phân giải cao do UAV thu được ở độ cao rất thấp để phát triển và đánh giá phương pháp ước tính mật độ cây lúa mì ở giai đoạn nảy mầm. Theo các tác giả, UAV khắc phục những hạn chế của hệ thống rover được trang bị camera và là một phương pháp không xâm lấn để ước tính mật độ cây trồng, cho phép nông dân đạt được năng suất cao cần thiết cho việc xác định kiểu hình trên đồng ruộng mà không phụ thuộc vào khả năng lưu thông của đất. Li và cộng sự. (2017) đã thu thập hàng trăm hình ảnh nổi với độ phân giải cực cao bằng hệ thống dựa trên UAV để ước tính các thông số của ngô, bao gồm chiều cao tán và sinh khối trên mặt đất. Cuối cùng, Yue và cộng sự. (2016) nhận thấy rằng chiều cao cây trồng được xác định từ UAV có thể nâng cao ước tính sinh khối trên mặt đất (AGB).
Một cách tiếp cận để theo dõi sự tăng trưởng của cây trồng là ý tưởng phát triển các mô hình bề mặt cây trồng (Bendig và cộng sự, 2014, 2015; Holman và cộng sự, 2016; Panday, Shrestha và cộng sự, 2020; Sumesh và cộng sự, 2021). Một số nghiên cứu nhấn mạnh tính khả thi của hình ảnh chụp từ UAV để ghi lại chiều cao của cây và theo dõi sự phát triển của chúng. Ví dụ, Bendig và cộng sự. (2013) đã mô tả sự phát triển của mô hình bề mặt cây trồng đa thời gian với độ phân giải rất cao dưới 0.05 m bằng cách sử dụng UAV. Họ nhằm mục đích phát hiện cây trồng
sự biến đổi sinh trưởng và sự phụ thuộc của nó vào cách xử lý cây trồng, giống cây trồng và stress. Bendig và cộng sự. (2014) đã sử dụng thiết bị bay không người lái để ước tính sinh khối tươi và khô dựa trên chiều cao cây được chiết xuất từ mô hình bề mặt cây trồng và nhận thấy rằng, không giống như các nền tảng trên không và quét laser trên mặt đất, hình ảnh có độ phân giải cao từ thiết bị bay không người lái có thể làm tăng đáng kể độ chính xác của mô hình chiều cao cây trồng cho các mức tăng trưởng khác nhau. các giai đoạn. Tương tự như vậy, Geipel et al. (2014) đã sử dụng UAV trong nghiên cứu của họ để thu được hình ảnh
dữ liệu dự đoán năng suất hạt ngô ở ba giai đoạn sinh trưởng khác nhau từ đầu đến giữa vụ và kết luận rằng sự kết hợp giữa mô hình quang phổ và không gian dựa trên hình ảnh chụp từ trên không và mô hình bề mặt cây trồng là phương pháp phù hợp để dự đoán năng suất ngô giữa vụ. Cuối cùng, Gnadinger ¨ và Schmidhalter (2017) đã kiểm tra tính tiện ích của UAV trong việc xác định kiểu hình chính xác và nhấn mạnh rằng việc sử dụng công nghệ này có thể nâng cao khả năng quản lý trang trại và cho phép thử nghiệm trên đồng ruộng cho mục đích nhân giống và nông học. Nhìn chung, chúng tôi nhận thấy rằng các ấn phẩm ở cụm 2 tập trung vào những ưu điểm chính của UAV trong điều khiển từ xa.
kiểu hình, ước tính năng suất, mô hình hóa bề mặt cây trồng và đếm cây. Các nghiên cứu trong tương lai có thể đào sâu hơn bằng cách phát triển các phương pháp mới để xác định kiểu hình từ xa có thể tự động hóa và tối ưu hóa việc xử lý dữ liệu viễn thám (Barabaschi và cộng sự, 2016; Liebisch và cộng sự, 2015; Mochida và cộng sự, 2015; S. Chu và cộng sự ., 2021). Ngoài ra, hiệu suất của các cảm biến IoT gắn trên UAV và sự cân bằng giữa chi phí, nhân công và độ chính xác của ước tính năng suất cần được nghiên cứu trong
tương lai (Ju & Son, 2018a, 2018b; Xie & Yang, 2020; Yue và cộng sự, 2018). Cuối cùng, cần phải phát triển các phương pháp xử lý hình ảnh hiệu quả để tạo ra thông tin đáng tin cậy, tối đa hóa hiệu quả trong sản xuất nông nghiệp và giảm thiểu công việc đếm thủ công của nông dân (RU Khan và cộng sự, 2021; Koh và cộng sự, 2021; Lin & Guo, 2020; C. Zhang và cộng sự, 2020).
Cụm 3. Các ấn phẩm trong cụm này thảo luận về các loại hệ thống hình ảnh khác nhau để viễn thám tài nguyên nông nghiệp được sử dụng trên nền tảng UAV. Về vấn đề này, hình ảnh nhiệt cho phép theo dõi nhiệt độ bề mặt để ngăn ngừa thiệt hại cho cây trồng và phát hiện sớm căng thẳng do hạn hán (Awais và cộng sự, 2022; García-Tejero và cộng sự, 2018; Sankaran và cộng sự, 2015; Santesteban và cộng sự, 2017; Yeom, 2021). Baluja và cộng sự. (2012) khẳng định rằng việc sử dụng máy ảnh nhiệt và đa phổ trên tàu
UAV cho phép các nhà nghiên cứu thu được hình ảnh có độ phân giải cao và đánh giá tình trạng nước của cây nho. Điều này có thể hữu ích để phát triển các mô hình lập lịch trình nước mới sử dụng dữ liệu viễn thám (Baluja và cộng sự, 2012). Bởi vì
khả năng tải hạn chế của UAV, Ribeiro-Gomes et al. (2017) đã xem xét việc tích hợp camera nhiệt không được làm mát vào UAV để xác định áp lực nước trong cây, điều này làm cho loại UAV này hiệu quả và khả thi hơn so với viễn thám dựa trên vệ tinh truyền thống và UAV được trang bị camera nhiệt được làm mát. Theo các tác giả, camera nhiệt không được làm mát nhẹ hơn camera được làm mát, cần phải hiệu chỉnh phù hợp. Gonzalez-Dugo và cộng sự. (2014) cho thấy rằng hình ảnh nhiệt tạo ra các bản đồ không gian về các chỉ số căng thẳng về nước của cây trồng một cách hiệu quả để đánh giá tình trạng nước và định lượng căng thẳng về nước trong và trong các vườn cây ăn quả có múi. Gonzalez-Dugo và cộng sự. (2013) và Santesteban và cộng sự. (2017) đã nghiên cứu việc sử dụng hình ảnh nhiệt UAV có độ phân giải cao để ước tính sự thay đổi trạng thái nước của vườn cây thương mại và vườn nho.
Hình ảnh đa phổ có thể cung cấp dữ liệu lớn so với hình ảnh RGB (Đỏ, Xanh lục và Xanh lam) truyền thống (Ad˜ ao et al., 2017; Navia et al., 2016). Dữ liệu quang phổ này, cùng với dữ liệu không gian, có thể hỗ trợ các mục đích phân loại, lập bản đồ, dự báo, dự đoán và phát hiện (Berni và cộng sự, 2009b). Theo Candiago và cộng sự. (2015), hình ảnh đa phổ dựa trên UAV có thể đóng góp to lớn vào việc đánh giá cây trồng và nông nghiệp chính xác như một nguồn tài nguyên đáng tin cậy và hiệu quả. Cũng,
Khaliq và cộng sự. (2019) đã thực hiện so sánh giữa hình ảnh đa phổ dựa trên vệ tinh và UAV. Các hình ảnh dựa trên UAV mang lại kết quả chính xác hơn trong việc mô tả sự biến đổi của vườn nho cũng như bản đồ sức sống để thể hiện các tán cây trồng. Tóm lại, các bài viết trong cụm này thảo luận về việc kết hợp các cảm biến hình ảnh nhiệt và đa phổ vào máy bay không người lái nông nghiệp. Theo đó, cần nhiều nghiên cứu hơn để hiểu cách có thể tích hợp hình ảnh nhiệt và đa phổ với AI
các kỹ thuật (ví dụ: học sâu) để phát hiện căng thẳng ở thực vật (Ampatzidis và cộng sự, 2020; Ampatzidis & Partel, 2019; Jung và cộng sự, 2021; Santesteban và cộng sự, 2017; Syeda và cộng sự, 2021). Những hiểu biết sâu sắc như vậy sẽ giúp đảm bảo việc phát hiện cũng như theo dõi sự phát triển, stress và hiện tượng học của thực vật hiệu quả và chính xác hơn (Buters và cộng sự, 2019; Cao và cộng sự, 2020; Neupane & BaysalGurel, 2021; L. Zhou và cộng sự, 2020).
Cụm 4. Cụm này bao gồm bảy bài báo xoay quanh vai trò quan trọng của hình ảnh quang phổ và hình ảnh siêu phổ trong việc hỗ trợ các hoạt động nông nghiệp. Hình ảnh siêu phổ đã tự khẳng định mình là một phương pháp viễn thám cho phép đánh giá định lượng hệ thống trái đất (Schaepman và cộng sự, 2009). Nói chính xác hơn, nó cho phép xác định các vật liệu bề mặt, định lượng nồng độ (tương đối) và sự phân công tỷ lệ thành phần bề mặt
trong các pixel hỗn hợp (Kirsch và cộng sự, 2018; Zhao và cộng sự, 2022). Nói cách khác, độ phân giải quang phổ cao hơn do hệ thống siêu phổ cung cấp cho phép ước tính chính xác hơn các thông số khác nhau, chẳng hạn như đặc tính thực vật hoặc hàm lượng nước trong lá (Suomalainen và cộng sự, 2014). Các nhà nghiên cứu trong cụm này đã điều tra các khía cạnh khác nhau của các hệ thống như vậy. Trong số những người khác, Aasen et al. (2015b) đã đưa ra một cách tiếp cận độc đáo để lấy được thông tin siêu phổ ba chiều từ các vật liệu nhẹ.
camera chụp nhanh được sử dụng trên UAV để theo dõi thảm thực vật. Lucieer và cộng sự. (2014) đã thảo luận về thiết kế, phát triển và hoạt động trên không của một UAS siêu quang mới cũng như việc hiệu chuẩn, phân tích và giải thích dữ liệu hình ảnh được thu thập cùng với nó. Cuối cùng, Honkavaara và cộng sự. (2013b) đã phát triển một phương pháp xử lý toàn diện cho các hình ảnh quang phổ dựa trên giao thoa kế FabryPerot và cho thấy việc sử dụng nó trong quy trình ước tính sinh khối cho nông nghiệp chính xác. Con đường tiềm năng trong tương lai cho cụm hiện tại này bao gồm việc nhấn mạnh nhu cầu cải tiến kỹ thuật trong công nghệ cảm biến (Aasen và cộng sự, 2015b) cũng như nhu cầu kết hợp và nâng cao các công nghệ bổ sung, đặc biệt là dữ liệu lớn và phân tích (Ang & Seng, 2021; Radoglou -Grammatikis và cộng sự, 2020; Shakoor và cộng sự, 2019). Điều thứ hai chủ yếu xuất phát từ dữ liệu ngày càng tăng được tạo ra bởi các cảm biến khác nhau được triển khai trong nông nghiệp thông minh (C. Li & Niu, 2020; A. Rejeb và cộng sự, 2022; Y. Su & Wang, 2021).
Cụm 5. Các ấn phẩm trong cụm này đã kiểm tra các ứng dụng Bản đồ 3D dựa trên máy bay không người lái. Sử dụng máy bay không người lái để lập bản đồ 3D có thể giảm bớt công việc thực địa phức tạp và tăng hiệu quả đáng kể (Torres-Sanchez ` et al., 2015). Năm bài viết trong cụm chủ yếu tập trung vào các ứng dụng giám sát thực vật. Ví dụ: để thu được dữ liệu ba chiều về diện tích tán, chiều cao cây và thể tích tán, Torres-Sanchez ` et al. (2015) đã sử dụng công nghệ UAV để tạo ra các mô hình bề mặt kỹ thuật số và sau đó là phương pháp phân tích hình ảnh dựa trên đối tượng (OBIA). Hơn nữa, Zarco-Tejada và cộng sự. (2014) đã định lượng chiều cao của cây bằng cách tích hợp công nghệ UAV và phương pháp tái tạo ảnh ba chiều. Jim'enez-Brenes Lopez-Granados, `De Castro, et al. (2017) đã trình diễn một quy trình mới để giám sát 3D, đa thời gian của hàng chục cây ô liu bằng cách tích hợp công nghệ UAV với phương pháp OBIA tiên tiến. Con đường thú vị cho các công việc trong tương lai trong cụm này bao gồm cải thiện hiện tại
các phương pháp (Zarco-Tejada và cộng sự, 2014) cho mục đích lập mô hình bề mặt kỹ thuật số (Ajayi và cộng sự, 2017; Jaud và cộng sự, 2016), chẳng hạn như OBIA (de Castro và cộng sự, 2018, 2020; Ventura và cộng sự. , 2018), và tái tạo ảnh hoặc phát triển các phương pháp mới (Díaz-Varela và cộng sự, 2015; Torres-S' anchez và cộng sự, 2015).
Cụm 6. Cụm này thảo luận về vai trò của máy bay không người lái trong giám sát nông nghiệp. UAV có thể bổ sung và khắc phục những thiếu sót của việc chụp ảnh vệ tinh và máy bay. Ví dụ, chúng có thể cung cấp hình ảnh có độ phân giải cao gần thời gian thực với ít nhiên liệu hơn hoặc thách thức trong việc thử nghiệm, dẫn đến việc giám sát liên tục và theo thời gian thực cũng như cải thiện việc ra quyết định (S. Herwitz và cộng sự, 2004). Một đóng góp quan trọng khác của UAV là khả năng cung cấp dữ liệu theo địa điểm cụ thể cho nông nghiệp chính xác hoặc canh tác theo địa điểm cụ thể vì dữ liệu chi tiết, độ phân giải cao về các thông số khác nhau cho phép nông dân chia đất thành các phần đồng nhất và xử lý chúng phù hợp (Hunt et al. , 2010; CC Lelong và cộng sự, 2008; Primicerio và cộng sự, 2012). Giám sát nông nghiệp dựa trên UAV như vậy có thể hỗ trợ giám sát an ninh lương thực và ra quyết định (SR Herwitz và cộng sự, 2004). Để thúc đẩy nghiên cứu về giám sát nông nghiệp, không chỉ cần cải tiến cảm biến, UAV và các công nghệ liên quan khác cũng như phương pháp liên lạc và truyền dữ liệu của chúng (Ewing et al., 2020; Shuai et al., 2019), mà còn tích hợp máy bay không người lái với nhiều loại thiết bị khác nhau. các công nghệ để tối ưu hóa các nhiệm vụ khác nhau liên quan đến nông nghiệp thông minh, như giám sát, giám sát nông nghiệp và ra quyết định, là một lĩnh vực nghiên cứu có tiềm năng cao (Alsamhi và cộng sự, 2021; Popescu và cộng sự, 2020; Vuran và cộng sự, 2018). Về vấn đề này, IoT, WSN và dữ liệu lớn mang lại những khả năng bổ sung thú vị (van der Merwe và cộng sự, 2020). Chi phí triển khai, tiết kiệm chi phí, hiệu quả sử dụng năng lượng và bảo mật dữ liệu là một trong những lĩnh vực chưa được nghiên cứu để tích hợp như vậy (Masroor và cộng sự, 2021).
Các quốc gia và tổ chức học thuật
Bước cuối cùng bao gồm việc điều tra nước xuất xứ và mối quan hệ học thuật của các tác giả. Thông qua phân tích này, chúng tôi mong muốn hiểu rõ hơn về sự phân bố địa lý của các học giả đóng góp vào việc ứng dụng máy bay không người lái trong nông nghiệp. Điều đáng chú ý là sự đa dạng của các quốc gia và các tổ chức học thuật. Từ góc độ quốc gia, Hoa Kỳ, Trung Quốc, Ấn Độ và Ý đứng đầu danh sách về số lượng công bố (Bảng 7). Hiện tại
nghiên cứu về máy bay không người lái trong nông nghiệp chủ yếu tập trung ở các nước Bắc Mỹ và Châu Á, chủ yếu là do họ tham gia nhiều vào các ứng dụng nông nghiệp chính xác. Ví dụ, tại Hoa Kỳ, thị trường máy bay không người lái nông nghiệp ước tính đạt 841.9 triệu USD vào năm 2020, chiếm khoảng 30% thị phần toàn cầu (ReportLinker, 2021). Được xếp hạng là nền kinh tế lớn nhất thế giới, Trung Quốc được dự đoán sẽ đạt quy mô thị trường xấp xỉ 2.6 tỷ USD vào năm 2027. Quốc gia này đang kêu gọi sử dụng máy bay không người lái trong nông nghiệp để khắc phục các vấn đề về năng suất và đạt năng suất tốt hơn, giảm bớt lao động và đầu vào sản xuất ít hơn. Tuy nhiên, việc áp dụng công nghệ này ở Trung Quốc cũng được thúc đẩy bởi các yếu tố như quy mô dân số và nhu cầu đổi mới cũng như cải thiện các phương pháp quản lý cây trồng hiện có.
Các quốc gia và trường đại học/tổ chức có năng suất cao nhất đóng góp vào
nghiên cứu liên quan đến máy bay không người lái nông nghiệp.
| Cấp | Các quốc gia |
| 1 | US |
| 2 | Trung Quốc |
| 3 | Ấn Độ |
| 4 | Italy |
| 5 | Tây Ban Nha |
| 6 | Nước Đức |
| 7 | Brazil |
| 8 | Châu Úc |
| 9 | Nhật Bản |
| 10 | Vương quốc Anh |
| Cấp | Trường đại học/Tổ chức |
| 1 | Học viện Khoa học Trung Quốc |
| 2 | Bộ Nông nghiệp Cộng hòa Nhân dân Trung Hoa |
| 3 | Hội đồng điều tra khoa học cấp trên |
| 4 | Đại học Texas A & M |
| 5 | Đại học Nông nghiệp Trung Quốc |
| 6 | Dịch vụ nghiên cứu nông nghiệp USDA |
| 7 | CSIC – Instituto de Agricultura Sostenible IAS |
| 8 | Đại học Purdue |
| 9 | Hội đồng nghiên cứu quốc gia |
| 10 | Đại học Nông nghiệp Nam Trung Quốc |
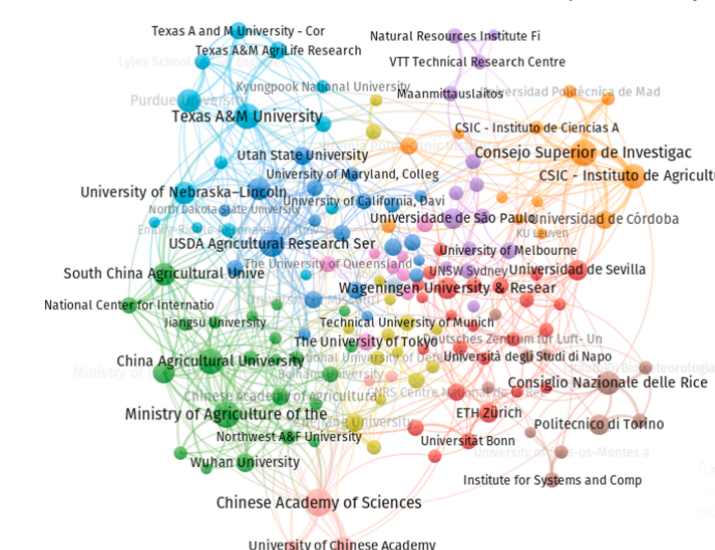
Từ góc độ trường đại học và tổ chức, Viện Hàn lâm Khoa học Trung Quốc đứng đầu danh sách về số lượng ấn phẩm, tiếp theo là Bộ Nông nghiệp Cộng hòa Nhân dân Trung Hoa và Consejo Superior de Investigaciones Científicas. Viện Hàn lâm Khoa học Trung Quốc có đại diện là các tác giả Liao Xiaohan và Li Jun; Han Wenting đại diện cho Bộ Nông nghiệp Cộng hòa Nhân dân Trung Hoa; và Consejo Superior de Investigaciones Científicas được đại diện bởi Lopez-Granados, ´ F. và Pena, ‘Jos’e María S. Từ Hoa Kỳ, các trường đại học như Đại học Texas A&M và Đại học Purdue tìm thấy
đề cập đến. Các trường đại học có số lượng ấn phẩm và mối liên hệ cao nhất được thể hiện trong Hình 4. Ngoài ra, danh sách này bao gồm các tổ chức như Consiglio Nazionale delle Ricerche và Consejo Superior de Investigaciones Científicas đang hoạt động trong nghiên cứu khoa học nhưng không phải là tổ chức học thuật .
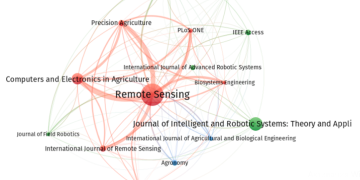
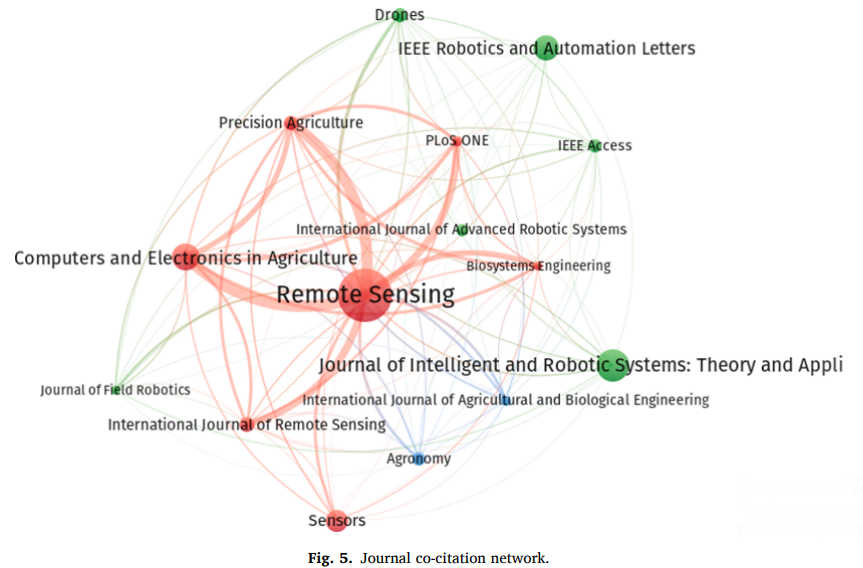
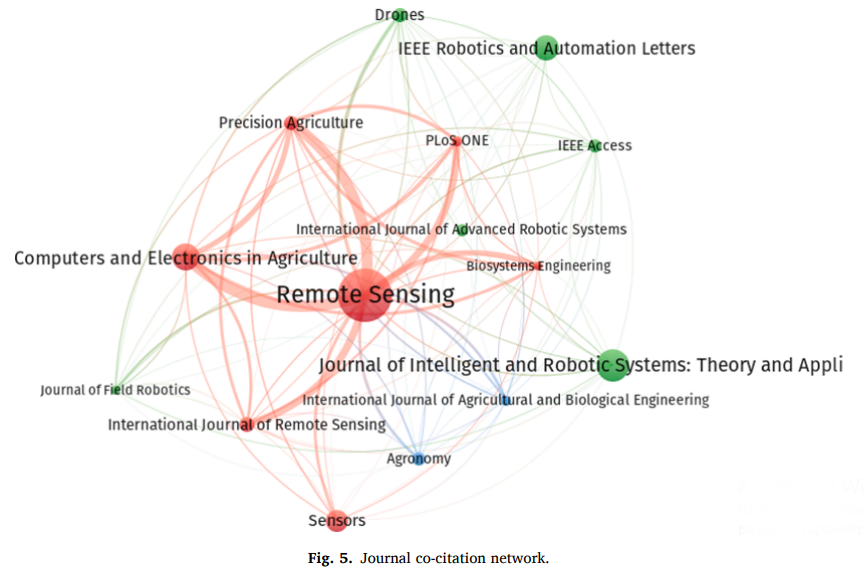
Lựa chọn của chúng tôi bao gồm rất nhiều tạp chí, bao gồm hầu như tất cả các dữ liệu có sẵn. Như thể hiện trong Bảng 8, Viễn thám với 258 bài đứng đầu, tiếp theo là Tạp chí Hệ thống thông minh và robot: Lý thuyết và ứng dụng với 126 và Máy tính và Điện tử trong Nông nghiệp với 98 bài. Trong khi Viễn thám chủ yếu tập trung vào ứng dụng và phát triển máy bay không người lái, thì Máy tính và Điện tử trong Nông nghiệp chủ yếu đề cập đến những tiến bộ về phần cứng, phần mềm, điện tử và hệ thống điều khiển máy tính trong nông nghiệp. Các cửa hàng liên khu vực, chẳng hạn như IEEE Robotics và Automation Letters với 87 ấn phẩm và IEEE Access với 34 ấn phẩm, cũng là những cửa hàng hàng đầu trong lĩnh vực này. Mười lăm cửa hàng hàng đầu đã đóng góp cho tài liệu với 959 tài liệu, chiếm khoảng 20.40% tổng số ấn phẩm. Phân tích đồng trích dẫn của tạp chí cho phép chúng tôi kiểm tra tầm quan trọng và sự tương đồng giữa các ấn phẩm. Phân tích đồng trích dẫn mang lại ba cụm, như trong Hình 5. Cụm màu đỏ bao gồm các tạp chí như Viễn thám, Máy tính và Điện tử trong Nông nghiệp, Cảm biến,
và Tạp chí quốc tế về viễn thám. Tất cả các cửa hàng này đều là những tạp chí có uy tín cao trong lĩnh vực viễn thám và nông nghiệp chính xác. Cụm màu xanh lá cây chứa các tạp chí liên quan đến robot, chẳng hạn như Tạp chí Hệ thống thông minh và robot: Lý thuyết và ứng dụng, Thư từ về robot và tự động hóa của IEEE, Truy cập IEEE và Máy bay không người lái. Các cơ quan này chủ yếu xuất bản các bài báo về tự động hóa và rất hữu ích cho các kỹ sư nông nghiệp. Cụm cuối cùng được hình thành bởi các tạp chí liên quan đến nông học và kỹ thuật nông nghiệp, như Nông học và Tạp chí Quốc tế về Kỹ thuật Nông nghiệp và Sinh học.
15 tạp chí hàng đầu về nghiên cứu liên quan đến máy bay không người lái trong nông nghiệp.
| Cấp | Bài viết | Đếm |
| 1 | Viễn thám | 258 |
| 2 | Tạp chí Hệ thống thông minh và robot: Lý thuyết và Ứng dụng | 126 |
| 3 | Máy tính và điện tử trong nông nghiệp | 98 |
| 4 | IEEE Robotics và Automation Letters | 87 |
| 5 | Cảm biến | 73 |
| 6 | Tạp chí quốc tế về viễn thám | 42 |
| 7 | Nông nghiệp chính xác | 41 |
| 8 | Các phương tiện bay không người lái | 40 |
| 9 | Nông học | 34 |
| 10 | Quyền truy cập IEEE | 34 |
| 11 | Tạp chí quốc tế về hệ thống robot tiên tiến | 31 |
| 12 | Tạp chí quốc tế về kỹ thuật nông nghiệp và sinh học | 25 |
| 13 | PLoS ONE | 25 |
| 14 | Tạp chí Robot hiện trường | 23 |
| 15 | Kỹ thuật sinh học | 23 |
Kết luận
Tổng kết
Trong nghiên cứu này, chúng tôi tóm tắt và phân tích nghiên cứu hiện có về máy bay không người lái trong nông nghiệp. Áp dụng các kỹ thuật đo thư mục khác nhau, chúng tôi cố gắng hiểu rõ hơn về cấu trúc trí tuệ của nghiên cứu liên quan đến máy bay không người lái trong nông nghiệp. Tóm lại, đánh giá của chúng tôi đưa ra một số đóng góp bằng cách xác định và thảo luận về các từ khóa trong tài liệu, tiết lộ các cụm kiến thức đồng thời hình thành các cộng đồng tương tự về mặt ngữ nghĩa trong lĩnh vực máy bay không người lái, phác thảo nghiên cứu trước đó và đề xuất hướng nghiên cứu trong tương lai. Dưới đây, chúng tôi phác thảo những phát hiện chính của đánh giá về sự phát triển của máy bay không người lái trong nông nghiệp:
• Nền văn học nói chung đã phát triển nhanh chóng và thu hút được sự chú ý lớn trong thập kỷ qua, thể hiện qua sự gia tăng số lượng bài báo sau năm 2012. Mặc dù lĩnh vực kiến thức này vẫn chưa đạt đến độ chín hoàn toàn (Barrientos et al., 2011; Maes & Steppe, 2019), một số câu hỏi vẫn chưa được trả lời. Ví dụ, tiện ích của máy bay không người lái trong canh tác trong nhà vẫn còn gây tranh cãi (Aslan và cộng sự, 2022; Krul và cộng sự, 2021; Rold' an và cộng sự, 2015). Sự phức tạp của các cảnh trường và các hoàn cảnh hình ảnh khác nhau (ví dụ: bóng tối và độ chiếu sáng) có thể dẫn đến sự khác biệt quang phổ cao hơn trong lớp (Yao và cộng sự, 2019). Ngay cả trong các giai đoạn nghiên cứu sau này, các nhà nghiên cứu đã gặp khó khăn trong việc xác định kế hoạch bay tối ưu theo các tình huống cụ thể và chất lượng hình ảnh cần thiết (Soares và cộng sự, 2021; Tu và cộng sự,
2020).
• Chúng tôi nhận thấy rằng lĩnh vực này đã phát triển từ việc phát triển hệ thống UAV hiệu quả sang kết hợp các kỹ thuật AI, chẳng hạn như học máy và học sâu trong thiết kế máy bay không người lái nông nghiệp (Bah và cộng sự, 2018; Kitano và cộng sự, 2019; Maimaitijiang và cộng sự. , 2020; Mazzia và cộng sự, 2020; Tetila và cộng sự, 2020).
• Nghiên cứu về máy bay không người lái trong nông nghiệp chủ yếu thảo luận về viễn thám bằng cách khám phá tiềm năng của công nghệ trong giám sát môi trường, quản lý cây trồng và quản lý cỏ dại (cụm 1) cũng như ước tính kiểu hình và năng suất từ xa (cụm 2). Một loạt các nghiên cứu có ảnh hưởng về máy bay không người lái trong nông nghiệp bao gồm Austin (2010), Berni et al. (2009)a, Herwitz và cộng sự. (2004), Nex và Remondino (2014), Zhang và Kovacs (2012). Những nghiên cứu này đã phát triển cơ sở khái niệm của nghiên cứu liên quan đến máy bay không người lái trong bối cảnh nông nghiệp.
• Liên quan đến phương pháp luận, chúng tôi nhận thấy rằng hầu hết các nghiên cứu được thực hiện cho đến nay đều bao gồm các nghiên cứu dựa trên thiết kế hệ thống, khái niệm hoặc dựa trên đánh giá (Inoue, 2020; Nex & Remondino, 2014; P'erez-Ortiz et al. , 2015; Yao và cộng sự, 2019). Chúng tôi cũng nhận thấy việc thiếu các phương pháp thực nghiệm, định tính và dựa trên nghiên cứu trường hợp trong việc điều tra máy bay không người lái trong nông nghiệp.
• Gần đây, các chủ đề liên quan đến nông nghiệp chính xác, kỹ thuật AI, nghề trồng nho chính xác và đánh giá căng thẳng về nước đã thu hút được sự chú ý đáng kể (Espinoza và cộng sự, 2017; Gomez-Cand ` trên ` và cộng sự, 2016; Matese và cộng sự, 2015; Matese & Di Gennaro, 2018, 2021; Z. Chu và cộng sự, 2021). Việc kiểm tra cẩn thận các cụm nghiên cứu trong hai thời kỳ riêng biệt, 1990–2010 và 2011–2021, cho thấy sự tiến bộ trong cấu trúc trí tuệ của lĩnh vực này. Giai đoạn từ 1990 đến 2010 là giai đoạn hình thành các khái niệm trung tâm và khái niệm về máy bay không người lái, điều này thể hiện rõ qua cuộc thảo luận về thiết kế, phát triển và triển khai máy bay không người lái. Trong kỷ nguyên thứ hai, trọng tâm nghiên cứu mở rộng sang các nghiên cứu trước đó, nỗ lực tổng hợp các trường hợp sử dụng UAV trong nông nghiệp. Chúng tôi cũng tìm thấy nhiều nghiên cứu thảo luận về ứng dụng máy bay không người lái trong nhiệm vụ chụp ảnh và nông nghiệp chính xác.
| Cấp | Bài viết | Đếm |
| 1 | Viễn thám | 258 |
| 2 | Tạp chí Hệ thống thông minh và robot: Lý thuyết và | 126 |
| Ứng dụng | ||
| 3 | Máy tính và điện tử trong nông nghiệp | 98 |
| 4 | IEEE Robotics và Automation Letters | 87 |
| 5 | Cảm biến | 73 |
| 6 | Tạp chí quốc tế về viễn thám | 42 |
| 7 | Nông nghiệp chính xác | 41 |
| 8 | Các phương tiện bay không người lái | 40 |
| 9 | Nông học | 34 |
| 10 | Quyền truy cập IEEE | 34 |
| 11 | Tạp chí quốc tế về hệ thống robot tiên tiến | 31 |
| 12 | Tạp chí quốc tế về kỹ thuật nông nghiệp và sinh học | 25 |
| 13 | PLoS ONE | 25 |
| 14 | Tạp chí Robot hiện trường | 23 |
| 15 | Kỹ thuật sinh học | 22 |
Những gợi ý
Quá trình đánh giá thư mục của chúng tôi được thiết kế và thực hiện với sự lưu tâm đến các học giả, nông dân, chuyên gia nông nghiệp, nhà tư vấn cây trồng và nhà thiết kế hệ thống máy bay không người lái. Theo hiểu biết tốt nhất của các tác giả, đây là một trong những bài đánh giá ban đầu đầu tiên thực hiện phân tích trắc lượng thư mục chuyên sâu về
ứng dụng drone trong nông nghiệp Chúng tôi đã tiến hành đánh giá toàn diện khối kiến thức này, sử dụng các phân tích trích dẫn và đồng trích dẫn của các ấn phẩm. Những nỗ lực của chúng tôi nhằm mô tả cấu trúc trí tuệ của nghiên cứu máy bay không người lái cũng mang lại những hiểu biết mới cho các học giả. Việc xem xét cẩn thận các từ khóa được sử dụng theo thời gian sẽ tiết lộ các điểm nóng và lĩnh vực nghiên cứu trọng tâm trong tài liệu liên quan đến máy bay không người lái. Hơn nữa, chúng tôi trình bày danh sách các nghiên cứu được trích dẫn nhiều nhất để xác định các công trình nghiên cứu có tác động mạnh nhất đã hoàn thành trong lĩnh vực này. Do đó, việc xác định các bài viết và từ khóa có thể cung cấp một điểm khởi đầu vững chắc để khám phá một số hướng nghiên cứu trong tương lai.
Điều quan trọng là chúng tôi đã tiết lộ các cụm phân loại các tác phẩm có thể so sánh được và giải thích chi tiết về kết quả. Các nghiên cứu được phân loại theo cụm giúp hiểu được cấu trúc trí tuệ của nghiên cứu UAV. Đáng chú ý, chúng tôi phát hiện ra rất ít nghiên cứu điều tra các yếu tố áp dụng máy bay không người lái
và các rào cản trong hoạt động trồng trọt (xem Bảng 9). Các nhà nghiên cứu trong tương lai có thể giải quyết khoảng cách tiềm năng này bằng cách tiến hành các nghiên cứu thực nghiệm nhằm đánh giá các yếu tố áp dụng máy bay không người lái trong các hoạt động nông nghiệp và điều kiện khí hậu khác nhau. Hơn nữa, nghiên cứu dựa trên nghiên cứu điển hình về hiệu quả của máy bay không người lái cần được hỗ trợ bằng dữ liệu thực tế từ hiện trường. Ngoài ra, việc thu hút nông dân và các nhà quản lý tham gia nghiên cứu học thuật sẽ có lợi cho cả sự tiến bộ về mặt lý thuyết và thực tiễn của nghiên cứu máy bay không người lái. Chúng tôi cũng có thể xác định những nhà nghiên cứu nổi bật nhất và những đóng góp của họ, điều này rất có giá trị vì nhận thức về các công trình có ảnh hưởng gần đây có thể đưa ra một số hướng dẫn cho những nỗ lực học thuật trong tương lai.
Bảng 9
Rào cản tiếp nhận UAV.
| Barrier | Mô tả |
| Bảo mật dữ liệu | An ninh mạng là một thách thức lớn đối với việc thực hiện Giải pháp IoT (Masroor và cộng sự, 2021). |
| Khả năng tương tác và hội nhập | Các công nghệ khác nhau như UAV, WSN, IoT, v.v. nên được tích hợp và truyền tải dữ liệu tăng mức độ phức tạp (Alsamhi và cộng sự, 2021; Popescu và cộng sự, 2020; Vuran và cộng sự, 2018). |
| Chi phí thực hiện | Đây là trường hợp đặc biệt đối với các hộ nông dân nhỏ và đối với tích hợp nhiều công nghệ tiên tiến khác nhau ( Masroor và cộng sự, 2021). |
| Kiến thức lao động và chuyên môn | Cần có phi công lái máy bay không người lái có tay nghề cao để vận hành máy bay không người lái. Đồng thời, triển khai nhiều công nghệ tiên tiến công nghệ đòi hỏi công nhân lành nghề (YB Huang và cộng sự, 2013; Tsouros và cộng sự, 2019). |
| Công suất động cơ và chuyến bay thời gian | Máy bay không người lái không thể hoạt động trong nhiều giờ và che phủ khu vực rộng lớn (Hardin & Hardin, 2010; Laliberte et al., 2007). |
| Tính ổn định, độ tin cậy và khả năng cơ động | Máy bay không người lái không ổn định trong điều kiện thời tiết xấu (Hardin & Hardin, 2010; Laliberte và cộng sự, 2007). |
| Giới hạn tải trọng và chất lượng cảm biến | Máy bay không người lái chỉ có thể mang tải trọng hạn chế dẫn đến khả năng tải cảm biến chất lượng thấp hơn (Nebiker et al., 2008). |
| Quy định | Vì máy bay không người lái cũng có thể nguy hiểm nên có những hậu quả nghiêm trọng quy định trong một số lĩnh vực (Hardin & Jensen, 2011; Laliberte & Rango, 2011). |
| Kiến thức của nông dân và quan tâm | Giống như các công nghệ tiên tiến khác, máy bay không người lái việc triển khai thành công cần có chuyên môn và cả kèm theo những điều không chắc chắn (Fisher và cộng sự, 2009; Lambert và cộng sự, 2004; Stafford, 2000). |
Do luôn có nhu cầu sử dụng hiệu quả các nguồn tài nguyên sẵn có để tối đa hóa năng suất, nông dân có thể tận dụng máy bay không người lái để đảm bảo quét cánh đồng của họ nhanh chóng, chính xác và tiết kiệm chi phí. Công nghệ này có thể hỗ trợ nông dân xác định tình trạng cây trồng và đánh giá tình trạng nước, giai đoạn chín, sự xâm nhập của côn trùng và nhu cầu dinh dưỡng. Khả năng viễn thám của máy bay không người lái có thể cung cấp cho nông dân dữ liệu quan trọng để dự đoán các vấn đề ở giai đoạn đầu và kịp thời đưa ra các biện pháp can thiệp phù hợp. Tuy nhiên, lợi ích của công nghệ chỉ có thể được hiện thực hóa nếu các thách thức được giải quyết đúng cách. Trong ánh sáng của
các vấn đề hiện tại liên quan đến bảo mật dữ liệu, các vấn đề về công nghệ cảm biến (ví dụ: độ tin cậy hoặc độ chính xác của phép đo), độ phức tạp của việc tích hợp và chi phí triển khai đáng kể, các nghiên cứu trong tương lai cũng phải xem xét tính khả thi về mặt kỹ thuật, kinh tế và vận hành của việc tích hợp máy bay không người lái nông nghiệp và các thiết bị cắt khác. công nghệ biên.
Hạn chế
Ngành học của chúng tôi có một vài hạn chế. Đầu tiên, những phát hiện được xác định bởi các ấn phẩm được lựa chọn để phân tích cuối cùng. Việc nắm bắt tất cả các nghiên cứu có liên quan đến máy bay không người lái trong nông nghiệp là một thách thức, đặc biệt là những nghiên cứu không được lập chỉ mục trong cơ sở dữ liệu Scopus. Hơn nữa, quá trình thu thập dữ liệu chỉ giới hạn ở việc đặt từ khóa tìm kiếm, có thể không bao gồm và dẫn đến kết quả không thuyết phục. Vì vậy, các nghiên cứu trong tương lai cần chú ý hơn đến vấn đề cơ bản của việc thu thập dữ liệu để đưa ra
kết luận đáng tin cậy hơn. Một hạn chế khác liên quan đến các ấn phẩm mới có số lượng trích dẫn thấp. Phân tích đo thư mục thiên về các ấn phẩm trước đó vì chúng có xu hướng nhận được nhiều trích dẫn hơn qua nhiều năm. Các nghiên cứu gần đây cần một khoảng thời gian nhất định để thu hút sự chú ý và tích lũy trích dẫn. Do đó, những nghiên cứu gần đây mang lại sự thay đổi mô hình sẽ không được xếp hạng trong mười tác phẩm có ảnh hưởng hàng đầu. Hạn chế này phổ biến trong việc kiểm tra các lĩnh vực nghiên cứu đang nổi lên nhanh chóng như máy bay không người lái trong nông nghiệp. Vì chúng tôi đã tham khảo ý kiến của Scopus để nghiên cứu tài liệu cho tác phẩm này nên các nhà nghiên cứu trong tương lai có thể xem xét các phương pháp khác nhau.
cơ sở dữ liệu, chẳng hạn như Web of Science và IEEE Xplore, để mở rộng tầm nhìn và nâng cao cấu trúc nghiên cứu.
Các nghiên cứu đo lường thư mục tiềm năng có thể xem xét các nguồn kiến thức quan trọng khác như tài liệu hội nghị, chương và sách để tạo ra những hiểu biết mới. Mặc dù lập bản đồ và điều tra các ấn phẩm toàn cầu về máy bay không người lái trong nông nghiệp, những phát hiện của chúng tôi không tiết lộ lý do đằng sau kết quả học thuật của các trường đại học. Điều này mở đường cho một lĩnh vực nghiên cứu mới trong việc giải thích một cách định tính tại sao một số trường đại học lại có năng suất cao hơn những trường khác khi nghiên cứu về nông nghiệp.
máy bay không người lái. Ngoài ra, các nghiên cứu trong tương lai có thể cung cấp cái nhìn sâu sắc về tiềm năng của máy bay không người lái trong việc tăng tính bền vững trong nông nghiệp theo một số cách như giám sát môi trường, quản lý cây trồng và lập bản đồ cỏ dại như một số nhà nghiên cứu đã chỉ ra (Chamuah & Singh, 2019; Islam và cộng sự, 2021; Popescu và cộng sự, 2020; J. Su, Liu và cộng sự, 2018b). Vì không thể phân tích văn bản do số lượng lớn các bài báo được lựa chọn nên cần có các đánh giá tài liệu có hệ thống để kiểm tra
phương pháp nghiên cứu được sử dụng và sự tham gia của nông dân trong các nghiên cứu trước đây. Nói tóm lại, phân tích của chúng tôi về nghiên cứu máy bay không người lái cho thấy mối liên kết vô hình của khối kiến thức này. Do đó, đánh giá này giúp khám phá mối quan hệ giữa các ấn phẩm và khám phá cấu trúc trí tuệ của lĩnh vực nghiên cứu. Nó cũng mô tả mối liên kết giữa các khía cạnh khác nhau của văn học, chẳng hạn như từ khóa, liên kết và quốc gia của tác giả.
Tuyên bố về lợi ích cạnh tranh
Các tác giả tuyên bố rằng họ không có lợi ích tài chính cạnh tranh hoặc mối quan hệ cá nhân nào có thể ảnh hưởng đến công việc được báo cáo trong bài báo này.
Phụ lục 1
TITLE-ABS-KEY (((máy bay không người lái* HOẶC “máy bay không người lái” HOẶC uav* HOẶC “hệ thống máy bay không người lái” HOẶC ua HOẶC “máy bay điều khiển từ xa”) VÀ (nông nghiệp HOẶC nông nghiệp HOẶC nông nghiệp HOẶC nông dân))) VÀ (LOẠI TRỪ (PUBYEAR, 2022)) VÀ (GIỚI HẠN (NGÔN NGỮ, “tiếng Anh”)).
dự án
Aasen, H., Burkart, A., Bolten, A., Bareth, G., 2015. Tạo thông tin siêu phổ 3D bằng camera chụp nhanh UAV hạng nhẹ để giám sát thảm thực vật: từ
hiệu chuẩn máy ảnh để đảm bảo chất lượng. ISPRS J. Photogramm. Cảm biến từ xa 108, 245–259. https://doi.org/10.1016/j.isprsjprs.2015.08.002.
Abd-Elrahman, A., Pearlstine, L., Percival, F., 2005. Phát triển thuật toán nhận dạng mẫu để phát hiện chim tự động từ hình ảnh máy bay không người lái.
Sự khảo sát. Thông tin đất đai. Khoa học. 65 (1), 37–45.
Abdollahi, A., Rejeb, K., Rejeb, A., Mostafa, MM, Zailani, S., 2021. Mạng cảm biến không dây trong nông nghiệp: hiểu biết sâu sắc từ phân tích trắc lượng thư mục. Tính bền vững 13 (21),
12011.
Aboutalebi, M., Torres-Rua, AF, Kustas, WP, Nieto, H., Coopmans, C., McKee, M.,Đánh giá các phương pháp khác nhau để phát hiện bóng trong hình ảnh quang học có độ phân giải cao và đánh giá tác động của bóng trong tính toán NDVI và sự thoát hơi nước. Tưới. Khoa học. 37 (3), 407–429. https://doi.org/10.1007/s00271-018-0613-9.
Adao, ˜ T., Hruˇska, J., Padua, ` L., Bessa, J., Peres, E., Morais, R., Sousa, JJ, 2017. Hình ảnh siêu phổ: đánh giá về cảm biến, dữ liệu dựa trên UAV xử lý và
ứng dụng cho nông nghiệp và lâm nghiệp. Viễn thám 9 (11). https://doi.org/ 10.3390/rs9111110.
Agüera Vega, F., Ramírez, FC, Saiz, MP, Rosúa, FO, 2015. Hình ảnh đa thời gian sử dụng máy bay không người lái để theo dõi vụ mùa hướng dương. Hệ thống sinh học. Anh.
132, 19–27. https://doi.org/10.1016/j.biosystemseng.2015.01.008.
Ajayi, OG, Salubi, AA, Angbas, AF, Odigure, MG, 2017. Việc tạo ra các mô hình độ cao kỹ thuật số chính xác từ UAV thu được các hình ảnh có tỷ lệ chồng chéo thấp. Int.
J. Viễn thám 38 (8–10), 3113–3134. https://doi.org/10.1080/ 01431161.2017.1285085.
Ali, I., Greifeneder, F., Stamenkovic, J., Neumann, M., Notarnicola, C., 2015. Đánh giá các phương pháp học máy để thu hồi sinh khối và độ ẩm của đất từ dữ liệu viễn thám. Viễn thám 7 (12), 16398–16421.
Alsamhi, SH, Afghah, F., Sahal, R., Hawbani, A., Al-qaness, MAA, Lee, B., Guizani, M., Internet xanh vạn vật sử dụng UAV trong mạng B5G: Đánh giá các ứng dụng
và các chiến lược. Quảng cáo. Học. Mạng. 117, 102505 https://doi.org/10.1016/j. adhoc.2021.102505.
Al-Thani, N., Albuainain, A., Alnaimi, F., Zorba, N., 2020. Máy bay không người lái để giám sát chăn nuôi cừu. Tại: Hội nghị kỹ thuật điện Địa Trung Hải lần thứ 20 của IEEE. https://doi.
org/10.1109/MELECON48756.2020.9140588.
Ampatzidis, Y., Partel, V., 2019. Kiểu hình thông lượng cao dựa trên UAV ở cây có múi sử dụng hình ảnh đa phổ và trí tuệ nhân tạo. Viễn thám 11 (4), https://doi.org/10.3390/rs11040410.
Ampatzidis, Y., Partel, V., Costa, L., 2020. Agroview: Ứng dụng dựa trên đám mây để xử lý, phân tích và trực quan hóa dữ liệu do UAV thu thập cho các ứng dụng nông nghiệp chính xác sử dụng trí tuệ nhân tạo. Máy tính. Điện tử. Nông nghiệp. 174, 105457 https://doi. org/10.1016/j.compag.2020.105457.
Ang, K.-L.-M., Seng, JKP, 2021. Dữ liệu lớn và học máy với thông tin siêu phổ trong nông nghiệp. Truy cập IEEE 9, 36699–36718. https://doi.org/10.1109/
TRUY CẬP.2021.3051196.
Aquilani, C., Confessore, A., Bozzi, R., Sirtori, F., Pugliese, C., 2022. Đánh giá: Công nghệ chăn nuôi chính xác trong các hệ thống chăn nuôi trên đồng cỏ. Động vật 16 (1), https://doi.org/10.1016/j.animal.2021.100429.
Armenta-Medina, D., Ramirez-Delreal, TA, Villanueva-Vasquez, ` D., Mejia-Aguirre, C., Xu hướng về công nghệ thông tin và truyền thông tiên tiến cho
nâng cao năng suất nông nghiệp: phân tích thư mục. Nông học 10 (12), Điều 12. https://doi.org/10.3390/agronomy10121989.
Armstrong, I., Pirrone-Brusse, M., Smith, A., Jadud, M., 2011. Cá sấu bay: hướng tới robot trên không trong occam-π. Cộng đồng. Kiến trúc sư quy trình. 2011, 329–340. https://doi. org/10.3233/978-1-60750-774-1-329.
Arora, SD, Chakraborty, A., 2021. Cấu trúc trí tuệ của nghiên cứu hành vi phàn nàn của người tiêu dùng (CCB): Phân tích thư mục. J. Kinh doanh Res. 122, 60–74.
Aslan, MF, Durdu, A., Sabanci, K., Ropelewska, E., Gültekin, SS, 2022.
Một cuộc khảo sát toàn diện về các nghiên cứu gần đây với UAV cho nông nghiệp chính xác trên cánh đồng rộng và nhà kính. ứng dụng. Khoa học. 12 (3), 1047. https://doi.org/10.3390/
ứng dụng12031047.
Atkinson, JA, Jackson, RJ, Bentley, AR, Ober, E., & Wells, DM (2018). Kiểu hình trường cho tương lai. Trong Đánh giá thực vật hàng năm trực tuyến (trang 719–736). John
Wiley & Sons, Ltd. doi: 10.1002/9781119312994.apr0651.
Austin, R., 2010. Hệ thống máy bay không người lái: Thiết kế, phát triển và triển khai UAV. Trong: Hệ thống máy bay không người lái: Thiết kế, phát triển và phát triển UAVS
Triển khai. John Wiley và các con trai. https://doi.org/10.1002/9780470664797.
Awais, M., Li, W., Cheema, MJM, Zaman, QU, Shaheen, A., Aslam, B., Zhu, W., Ajmal, M., Faheem, M., Hussain, S., Nadeem, AA, Afzal, MM, Liu, C., 2022. Viễn thám dựa trên UAV trong tình trạng căng thẳng ở thực vật hãy tưởng tượng việc sử dụng cảm biến nhiệt độ phân giải cao cho thực hành nông nghiệp kỹ thuật số: đánh giá tổng hợp. Int. J. Môi trường. Khoa học. Technol. https://doi.
org/10.1007/s13762-021-03801-5.
Bacco, M., Berton, A., Ferro, E., Gennaro, C., Gotta, A., Matteoli, S., Paonessa, F., Ruggeri, M., Virone, G., Zanella, A., 2018. Nông nghiệp thông minh: Cơ hội, thách thức
và những người hỗ trợ công nghệ. IoT dọc 2018 và. Hội nghị thượng đỉnh chuyên đề về nông nghiệp -Tuscany (IOT Tuscany) 1–6. https://doi.org/10.1109/IOTTUSCANY.2018.8373043.
Bah, MD, Hafiane, A., Canals, R., 2018. Học sâu với việc ghi nhãn dữ liệu không giám sát để phát hiện cỏ dại trên cây trồng trong hình ảnh UAV. Viễn thám 10(11), 1690.
https://doi.org/10.3390/rs10111690.
Baldi, S., 1998. Quy trình chuẩn mực và quy trình kiến tạo xã hội trong việc phân bổ các trích dẫn: một mô hình phân tích mạng. Là. Xã hội. Rev. 63 (6), 829–846. https://doi.
org/10.2307/2657504.
Baluja, J., Diago, MP, Balda, P., Zorer, R., Meggio, F., Morales, F., Tardaguila, J., 2012. Đánh giá sự thay đổi trạng thái nước của vườn nho theo nhiệt độ và đa quang phổ
Hình ảnh sử dụng máy bay không người lái (UAV). Tưới. Khoa học. 30 (6), 511–522. https://doi.org/10.1007/s00271-012-0382-9.
Barabaschi, D., Tondelli, A., Desiderio, F., Volante, A., Vaccino, P., Val`e, G., Cattivelli, L.,Nhân giống thế hệ tiếp theo. Khoa học thực vật. 242, 3–13. https://doi.org/10.1016/j.
thực vậtci.2015.07.010.
Barbedo, JGA, Koenigkan, LV, 2018. Quan điểm về việc sử dụng hệ thống máy bay không người lái để giám sát gia súc. Triển vọng Agric. 47 (3), 214–222. https://doi.org/10.1177/0030727018781876.
Bareth, G., Aasen, H., Bendig, J., Gnyp, ML, Bolten, A., Jung, A., Michels, R., Soukkamaki, ¨ J., 2015. Siêu phổ dựa trên UAV và trọng lượng thấp máy ảnh full-frame
để theo dõi cây trồng: So sánh quang phổ với các phép đo quang phổ cầm tay. Photogrammetrie, Fernerkundung, Thông tin địa lý 2015 (1), 69–79.
https://doi.org/10.1127/pfg/2015/0256.
Barrientos, A., Colorado, J., del Cerro, J., Martinez, A., Rossi, C., Sanz, D., Valente, J., Viễn thám trên không trong nông nghiệp: Một cách tiếp cận thực tế để bao phủ khu vực
và lập kế hoạch đường đi cho đội robot bay mini. J. Field Rob. 28 (5), 667–689. https://doi.org/10.1002/rob.20403.
Basiri, A., Mariani, V., Silano, G., Aatif, M., Iannelli, L., Glielmo, L., 2022. Khảo sát về việc áp dụng thuật toán hoạch định đường đi cho máy bay không người lái nhiều cánh quạt một cách chính xác
nông nghiệp. J. Điều hướng. 75 (2), 364–383.
Basnet, B., Bang, J., 2018. Công nghệ nông nghiệp thâm dụng tri thức tiên tiến: đánh giá về hệ thống cảm biến ứng dụng và phân tích dữ liệu. J. Sens. 2018, 1–13.
Bendig, J., Bolten, A., Bareth, G., 2013. Hình ảnh dựa trên UAV cho các mô hình bề mặt cây trồng có độ phân giải rất cao, đa thời gian để theo dõi sự biến đổi sinh trưởng của cây trồng. Photogrammetrie, Fernerkundung, Thông tin địa lý 2013 (6), 551–562. https://doi. org/10.1127/1432-8364/2013/0200.
Bendig, J., Bolten, A., Bennertz, S., Broscheit, J., Eichfuss, S., Bareth, G., 2014. Ước tính sinh khối của lúa mạch bằng cách sử dụng mô hình bề mặt cây trồng (CSM) có nguồn gốc từ hình ảnh RGB dựa trên UAV. Viễn thám 6 (11), 10395–10412.
Bendig, J., Yu, K., Aasen, H., Bolten, A., Bennertz, S., Broscheit, J., Gnyp, ML, Bareth, G., 2015. Kết hợp chiều cao cây dựa trên UAV từ bề mặt cây trồng mô hình,
các chỉ số thực vật có thể nhìn thấy và cận hồng ngoại để theo dõi sinh khối ở lúa mạch. Int. J. Ứng dụng. Quan sát Trái đất. Geoinf. 39, 79–87. https://doi.org/10.1016/j.jag.2015.02.012.
Berni, JA, Zarco-Tejada, PJ, Sepulcre-Canto, ` G., Fereres, E., Villalobos, F., 2009a. Lập bản đồ độ dẫn của tán và CWSI trong vườn ô liu bằng độ phân giải cao
ảnh viễn thám nhiệt. Cảm biến từ xa.Môi trường. 113 (11), 2380–2388. https://doi.org/10.1016/j.rse.2009.06.018.
Berni, JA, Zarco-Tejada, PJ, Suarez, `L., Fereres, E., 2009b. Viễn thám đa phổ nhiệt và băng hẹp để giám sát thảm thực vật từ máy bay không người lái. IEEE Trans. Geosci. Viễn thám 47 (3), 722–738.
Bouzembrak, Y., Klüche, M., Gavai, A., Marvin, HJP, 2019. Internet vạn vật trong an toàn thực phẩm: Đánh giá tài liệu và phân tích đo lường thư mục. Xu hướng khoa học thực phẩm. Technol. 94,54–64. https://doi.org/10.1016/j.tifs.2019.11.002.
Brewster, C., Roussaki, I., Kalatzis, N., Doolin, K., Ellis, K., 2017. IoT trong nông nghiệp: Thiết kế thí điểm quy mô lớn trên toàn Châu Âu. Cộng đồng IEEE. Mag. 55 (9), 26–33.
Buters, TM, Belton, D., Cross, AT, 2019. Theo dõi UAV đa cảm biến của từng cây con và cộng đồng cây con với độ chính xác đến từng milimet. Máy bay không người lái 3 (4), 81.
https://doi.org/10.3390/drones3040081.
Candiago, S., Remondino, F., De Giglio, M., Dubbini, M., Gattelli, M., 2015. Đánh giá hình ảnh đa quang phổ và chỉ số thực vật cho các ứng dụng canh tác chính xác từ hình ảnh UAV. Viễn thám 7 (4), 4026–4047. https://doi.org/10.3390/rs70404026.
Cao, Y., Li, GL, Luo, YK, Pan, Q., Zhang, SY, 2020. Giám sát các chỉ tiêu sinh trưởng của củ cải đường bằng chỉ số thực vật dải động rộng (WDRVI) có nguồn gốc từ UAV
hình ảnh đa phổ. Máy tính. Điện tử. Nông nghiệp. 171, 105331 https://doi.org/10.1016/j.compag.2020.105331.
Casillas, J., Acedo, F., 2007. Sự phát triển cấu trúc trí tuệ của tài liệu kinh doanh gia đình: nghiên cứu đo lường thư mục về FBR. Doanh nghiệp Gia đình Rev. 20 (2), 141–162.
Cen, H., Wan, L., Zhu, J., Li, Y., Li, X., Zhu, Y., Weng, H., Wu, W., Yin, W., Xu, C., Bao, Y., Feng, L., Shou, J., He, Y., 2019. Giám sát động lực sinh khối của lúa theo
các phương pháp xử lý nitơ khác nhau bằng cách sử dụng thiết bị bay không người lái hạng nhẹ với camera chụp nhanh khung hình kép. Phương pháp trồng trọt 15 (1), 32. https://doi.org/10.1186/s13007-019-
0418-8.
Chamuah, A., Singh, R., 2019. Đảm bảo tính bền vững trong nông nghiệp Ấn Độ thông qua máy bay không người lái dân sự: một quan điểm đổi mới có trách nhiệm. Ứng dụng SN Khoa học. 2 (1), 106. https://
doi.org/10.1007/s42452-019-1901-6.
Chamuah, A., Singh, R., 2022. Quản lý có trách nhiệm đối với những đổi mới về máy bay không người lái dân sự (UAV) đối với các ứng dụng bảo hiểm cây trồng của Ấn Độ. J. Chịu trách nhiệm
Technol. 9, 100025 https://doi.org/10.1016/j.jrt.2022.100025.
Chen, A., Orlov-Levin, V., Meron, M., 2019. Áp dụng hình ảnh trên không có kênh nhìn thấy có độ phân giải cao của tán cây trồng để quản lý tưới tiêu chính xác. Nông nghiệp. Nước
Quản lý. 216, 196–205. https://doi.org/10.1016/j.agwat.2019.02.017.
Daakir, M., Pierrot-Deseilligny, M., Bosser, P., Pichard, F., Thom, C., Rabot, Y., Martin, O., 2017. UAV hạng nhẹ với chức năng chụp ảnh trên máy bay và định vị GPS tần số đơn cho các ứng dụng đo lường. ISPRS J. Photogramm. Cảm biến từ xa 127, 115–126. https://doi.org/10.1016/j.isprsjprs.2016.12.007.
Dawaliby, S., Aberkane, A., Bradai, A., 2020. Nền tảng IoT dựa trên Blockchain để quản lý hoạt động của máy bay không người lái tự động. Trong: Kỷ yếu của ACM lần thứ 2
Hội thảo MobiCom về Truyền thông không dây được hỗ trợ bằng máy bay không người lái cho 5G và hơn thế nữa, trang 31–36. https://doi.org/10.1145/3414045.3415939.
Day, RA, Gastel, B., 1998. Cách viết và xuất bản một bài báo khoa học. Nhà xuất bản Đại học Cambridge. de Castro, AI, Pena, ˜ JM, Torres-Sanchez, ` J., Jim'enez-Brenes, FM, ValenciaGredilla, F., Recasens, J., Lopez-Granados, ` F., 2020. Lập bản đồ sự lây nhiễm của cynodon dactylon bao phủ cây trồng bằng quy trình OBIA cây quyết định tự động và hình ảnh UAV để trồng nho chính xác. Viễn thám 12 (1), 56. https://doi.org/10.3390/rs12010056.
de Castro, AI, Torres-S` anchez, J., Pena, ˜ JM, Jim'enez-Brenes, FM, Csillik, O., Lopez- `Granados, F., 2018. Thuật toán OBIA rừng ngẫu nhiên tự động cho lập bản đồ cỏ dại sớm giữa và trong các hàng cây trồng bằng hình ảnh UAV. Viễn thám 10 (2). https://doi.org/10.3390/rs10020285.
Demir, N., Sonmez, ¨ NK, Akar, T., Ünal, S., 2018. Đo tự động chiều cao cây của các kiểu gen lúa mì bằng cách sử dụng DSM có nguồn gốc từ hình ảnh máy bay không người lái. Kỷ yếu 2 (7), 350. https://doi.org/10.3390/ecrs-2-05163.
Deng, J., Zhong, Z., Huang, H., Lan, Y., Han, Y., Zhang, Y., 2020. Mạng phân đoạn ngữ nghĩa nhẹ để lập bản đồ cỏ dại theo thời gian thực bằng máy bay không người lái. ứng dụng. Khoa học. 10 (20), 7132. https://doi.org/10.3390/app10207132.
Deng, L., Mao, Z., Li, X., Hu, Z., Duan, F., Yan, Y., 2018. Viễn thám đa phổ dựa trên UAV cho nông nghiệp chính xác: so sánh giữa các máy ảnh khác nhau. ISPRS J. Photogramm. Cảm biến từ xa 146, 124–136.
Diaz-Gonzalez, FA, Vuelvas, J., Correa, CA, Vallejo, VE, Patino, D., 2022. Kỹ thuật học máy và viễn thám áp dụng để ước tính các chỉ số đất – xem xét. Sinh thái. Ấn Độ 135, 108517 https://doi.org/10.1016/j.ecolind.2021.108517.
Díaz-Varela, RA, De la Rosa, R., Leon, ` L., Zarco-Tejada, PJ, 2015. Hình ảnh máy bay không người lái có độ phân giải cao để đánh giá các thông số tán cây ô liu bằng ảnh 3D
tái thiết: ứng dụng trong thử nghiệm chăn nuôi. Viễn thám 7 (4), 4213–4232. https://doi.org/10.3390/rs70404213.
Dixit, A., Jakhar, SK, 2021. Quản lý năng lực sân bay: đánh giá và phân tích trắc lượng thư mục. J. Vận chuyển hàng không. Quản lý. 91, 102010.
Dong, T., Shang, J., Liu, J., Qian, B., Jing, Q., Ma, B., Huffman, T., Geng, X., Sow, A., Shi, Y., Canisius, F., Jiao, X., Kovacs, JM, Walters, D., Cable, J., Wilson, J., 2019.
Sử dụng hình ảnh RapidEye để xác định sự biến đổi trong phạm vi đồng ruộng về tốc độ tăng trưởng và năng suất cây trồng ở Ontario, Canada. Nông nghiệp chính xác. 20 (6), 1231–1250. https://doi.org/10.1007/
s11119-019-09646-w.
Dutta, PK, Mitra, S., 2021. Ứng dụng máy bay không người lái trong nông nghiệp và iot để hiểu chuỗi cung ứng thực phẩm thời kỳ hậu COVID-19. Trong: Choudhury, A., Biswas, A., Prateek, M.,
Chakrabarti, A. (Eds.), Tin học nông nghiệp: Tự động hóa bằng IoT và Học máy. Wiley, trang 67–87. van Eck, N., Waltman, L., 2009. Khảo sát phần mềm: VOSviewer, một chương trình máy tính để lập bản đồ thư mục. Khoa học lượng học 84 (2), 523–538. https://doi.org/10.1007/s11192-009-0146-3.
Elijah, O., Rahman, TA, Orikumhi, I., Leow, CY, Hindia, MN, 2018. Tổng quan về Internet of Things (IoT) và phân tích dữ liệu trong nông nghiệp: lợi ích và thách thức.
IEEE Internet Things J. 5 (5), 3758–3773.
Enciso, J., Avila, CA, Jung, J., Elsayed-Farag, S., Chang, A., Yeom, J., Landivar, J.,Maeda, M., Chavez, JC, 2019. Xác nhận tính chất nông học UAV và chiến trường
các phép đo cho các giống cà chua. Máy tính. Điện tử. Nông nghiệp. 158, 278–283. https:// doi.org/10.1016/j.compag.2019.02.011.
Espinoza, CZ, Khot, LR, Sankaran, S., Jacoby, PW, 2017. Đánh giá căng thẳng nước dựa trên viễn thám nhiệt và đa phổ có độ phân giải cao ở
cây nho được tưới dưới bề mặt. Viễn thám 9 (9), 961. https://doi.org/ 10.3390/rs9090961.
Ewing, J., Oommen, T., Jayakumar, P., Alger, R., 2020. Sử dụng viễn thám siêu phổ để phân loại đất. Viễn thám 12 (20), 3312. ttps://doi.org/10.3390/
rs12203312.
Fawcett, D., Panigada, C., Tagliabue, G., Boschetti, M., Celesti, M., Evdokimov, A., Biriukova, K., Colombo, R., Miglietta, F., Rascher, U., Anderson, K., 2020. Đánh giá đa thang độ về độ phản xạ bề mặt đa phổ dựa trên máy bay không người lái và các chỉ số thực vật trong điều kiện hoạt động. Viễn thám 12 (3), 514.
Feng, X., Yan, F., Liu, X., 2019. Nghiên cứu công nghệ truyền thông không dây trên Internet of Things cho nông nghiệp chính xác. Pers không dây. Cộng đồng. 108 (3),
1785-1802.
Ferreira, MP, Pinto, CF, Serra, FR, 2014. Lý thuyết chi phí giao dịch trong nghiên cứu kinh doanh quốc tế: một nghiên cứu đo lường thư mục trong ba thập kỷ. Khoa học lượng học 98 (3), 1899–1922. https://doi.org/10.1007/s11192-013-1172-8.
Fisher, P., Abuzar, M., Rab, M., Best, F., Chandra, S., 2009. Những tiến bộ trong nông nghiệp chính xác ở đông nam Australia. I. phương pháp hồi quy để mô phỏng
sự thay đổi không gian về sản lượng ngũ cốc bằng cách sử dụng sản lượng ruộng trước đây của nông dân và chỉ số thực vật khác biệt được chuẩn hóa. Cắt cỏ khoa học. 60 (9), 844–858.
Floreano, D., Wood, RJ, 2015. Khoa học, công nghệ và tương lai của máy bay không người lái tự động cỡ nhỏ. Thiên nhiên 521 (7553), 460–466. https://doi.org/10.1038/nature14542.
Friha, O., Ferrag, MA, Shu, L., Maglaras, LA, Wang, X., 2021. Internet vạn vật cho tương lai của nông nghiệp thông minh: khảo sát toàn diện về các công nghệ mới nổi. IEEE CAA J. Autom. Sinica 8 (4), 718–752.
Fuentes-Pacheco, J., Torres-Olivares, J., Roman-Rangel, E., Cervantes, S., JuarezLopez, P., Hermosillo-Valadez, J., Rendon-Mancha, ` JM, 2019. Phân đoạn cây vả từ các hình ảnh trên không bằng cách sử dụng mạng bộ mã hóa-giải mã tích chập sâu. Viễn thám 11 (10), 1157. https://doi.org/10.3390/rs11101157.
Gago, J., Douthe, C., Coopman, RE, Gallego, PP, Ribas-Carbo, M., Flexas, J., Escalona, J., Medrano, H., 2015. Thử thách của máy bay không người lái trong việc đánh giá căng thẳng về nước đối với
nông nghiệp bền vững. Nông nghiệp. Quản lý nước. 153, 9–19. https://doi.org/10.1016/j. agwat.2015.01.020.
García-Tejero, IF, Rubio, AE, Vinuela, ˜ I., Hern' andez, A., Guti'errez-Gordillo, S., Rodríguez-Pleguezuelo, CR, Dur' an-Zuazo, VH, 2018. Hình ảnh nhiệt tại nhà máy
để đánh giá tình trạng nước cây trồng ở cây hạnh nhân (cv. Guara) trong các chiến lược tưới tiêu thiếu hụt. Nông nghiệp. Quản lý nước. 208, 176–186. https://doi.org/10.1016/j.
agwat.2018.06.002.
Garzonio, R., Di Mauro, B., Colombo, R., Cogliati, S., 2017. Các phép đo quang phổ huỳnh quang do ánh nắng mặt trời và phản xạ bề mặt sử dụng UAS siêu phổ nhỏ. Viễn thám 9 (5), 472. https://doi.org/10.3390/rs9050472. Gaˇsparovi'c, M., Zrinjski, M., Barkovi'c, Đ., Radoˇcaj, D., 2020. Một phương pháp tự động cho
lập bản đồ cỏ dại trên các cánh đồng yến mạch dựa trên hình ảnh UAV. Máy tính. Điện tử. Nông nghiệp.
Gebbers, R., Adamchuk, VI, 2010. Nông nghiệp chính xác và an ninh lương thực. Khoa học 327 (5967), 828–831. https://doi.org/10.1126/science.1183899.
Geipel, J., Link, J., Claupein, W., 2014. Kết hợp mô hình quang phổ và không gian về năng suất ngô dựa trên hình ảnh chụp từ trên không và mô hình bề mặt cây trồng thu được bằng hệ thống máy bay không người lái. Viễn thám 6 (11), 10335–10355. https://doi.org/10.3390/rs61110335.
Geng, D., Feng, Y., Zhu, Q., 2020. Thiết kế bền vững cho người dùng: đánh giá tài liệu và phân tích trắc lượng thư mục. Môi trường. Khoa học. Ô nhiễm. Res. 27 (24), 29824–29836. https://doi. org/10.1007/s11356-020-09283-1.
Gevaert, CM, Suomalainen, J., Tang, J., Kooistra, L., 2015. Tạo ra các bề mặt phản ứng quang phổ thời gian bằng cách kết hợp vệ tinh đa phổ và siêu phổ
Hình ảnh UAV cho các ứng dụng nông nghiệp chính xác. IEEE J. Sel. Đứng đầu. ứng dụng. Quan sát Trái đất. Cảm biến từ xa 8 (6), 3140–3146. ttps://doi.org/10.1109/JSTARS.2015.2406339.
Gill, SS, Chana, I., Buyya, R., 2017. Nông nghiệp dựa trên IoT dưới dạng đám mây và dịch vụ dữ liệu lớn: sự khởi đầu của Ấn Độ kỹ thuật số. J. Tổ chức. và Máy tính của người dùng cuối. (JOEUC) 29 (4),
1-23.
Gmür, M., 2006. Phân tích đồng trích dẫn và tìm kiếm các trường đại học vô hình: đánh giá về phương pháp luận. Khoa học lượng học 57 (1), 27–57. https://doi.org/10.1023/
Đ: 1023619503005.
Gnadinger, ¨ F., Schmidhalter, U., 2017. Số lượng cây ngô bằng máy bay không người lái (UAV). Viễn thám 9 (6). https://doi.org/10.3390/rs9060544.
Gokto ¨ ǧan, AH, Sukkarieh, S., Bryson, M., Randle, J., Lupton, T., Hung, C., 2010. Máy bay không người lái cánh quay dùng để giám sát cỏ dại dưới nước và
sự quản lý. J. Trí tuệ. Hệ thống robot: Lý thuyết. ứng dụng. 57 (1–4), 467–484. https://doi. org/10.1007/s10846-009-9371-5.
Gomez-Cand ` on, ` D., De Castro, AI, Lopez-Granados, ` F., 2014. Đánh giá độ chính xác của ảnh ghép từ hình ảnh máy bay không người lái (UAV) cho mục đích nông nghiệp chính xác trên lúa mì. Chính xác. Nông nghiệp. 15 (1), 44–56. https://doi.org/10.1007/s11119-013-9335-4.
Gomez-Cand ` on, ` D., Virlet, N., Labb'e, S., Jolivot, A., Regnard, J.-L., 2016. Phân tích kiểu hình thực địa về căng thẳng nước ở quy mô cây bằng hình ảnh cảm biến UAV : thông tin chi tiết mới cho
thu thập và hiệu chuẩn nhiệt. Chính xác. Nông nghiệp. 17 (6), 786–800. https://doi.org/10.1007/s11119-016-9449-6.
Gonzalez-Dugo, V., Zarco-Tejada, PJ, Fereres, E., 2014. Khả năng ứng dụng và hạn chế của việc sử dụng chỉ số căng thẳng về nước của cây trồng như một chỉ số về tình trạng thiếu nước trong vườn cây ăn quả có múi. Nông nghiệp. Vì. Khí tượng. 198–199, 94–104. https://doi.org/10.1016/j. agrformet.2014.08.003.
Gonzalez-Dugo, V., Zarco-Tejada, P., Nicolas, ` E., Nortes, PA, Alarcon, ` JJ, Intrigliolo, DS, Fereres, E., 2013. Sử dụng hình ảnh nhiệt UAV có độ phân giải cao để
đánh giá sự thay đổi trạng thái nước của năm loài cây ăn quả trong vườn cây thương mại. Chính xác. Nông nghiệp. 14 (6), 660–678. https://doi.org/10.1007/s11119-013-9322-9.
Goyal, K., Kumar, S., 2021. Kiến thức tài chính: Đánh giá có hệ thống và phân tích đo lường thư mục. Int. J. Nghiên cứu người tiêu dùng 45 (1), 80–105. https://doi.org/10.1111/
ijcs.12605.
Grenzdorffer, ¨ GJ, Engel, A., Teichert, B., 2008. Tiềm năng quang trắc của uav giá rẻ trong lâm nghiệp và nông nghiệp. Cơ quan Lưu trữ Quốc tế về Quang trắc, Viễn thám và Khoa học Thông tin Không gian - Lưu trữ ISPRS 37, 1207–1213. https://www.scopus.com/inward/record.uri?eid=2-s2.0-85039543258&partnerI D=40&md5=b4b2d639257e8ddb5a373d15959c4e1e.
Guan, S., Fukami, K., Matsunaka, H., Okami, M., Tanaka, R., Nakano, H., Sakai, T., Nakano, K., Ohdan, H., Takahashi, K., 2019. Đánh giá mối tương quan của độ phân giải cao
NDVI với mức độ bón phân và năng suất lúa, lúa mỳ sử dụng thiết bị bay không người lái cỡ nhỏ. Viễn thám 11 (2), 112.
Gundolf, K., Filser, M., 2013. Nghiên cứu quản lý và tôn giáo: phân tích trích dẫn. J. Xe buýt. Đạo đức 112 (1), 177–185.
Guo, Q., Zhu, Y., Tang, Y., Hou, C., He, Y., Zhuang, J., Zheng, Y., Luo, S., 2020. Mô phỏng CFD và xác minh thử nghiệm không gian và phân bố theo thời gian của
luồng không khí chảy xuống của máy bay không người lái nông nghiệp bốn cánh quạt đang bay lơ lửng. Máy tính. Điện tử. Nông nghiệp. 172, 105343 https://doi.org/10.1016/j.compag.2020.105343.
Haghighattalab, A., Gonz' alez P'erez, L., Mondal, S., Singh, D., Schinstock, D., Rutkoski, J., Ortiz-Monasterio, I., Singh, RP, Goodin, D. , Ba Lan, J., 2016.
Ứng dụng hệ thống máy bay không người lái để tạo kiểu hình năng suất cao ở các vườn ươm nhân giống lúa mì quy mô lớn. Phương pháp thực vật 12 (1). https://doi.org/10.1186/s13007-
016-0134-6.
Hakala, T., Honkavaara, E., Saari, H., Makynen, ¨ J., Kaivosoja, J., Pesonen, L., & Pol ¨ onen, ¨I., 2013. Hình ảnh quang phổ từ UAV trong các điều kiện chiếu sáng khác nhau . Trong GG Bill R. (Ed.), Cơ quan lưu trữ quốc tế về quang trắc, viễn thám và khoa học thông tin không gian—Lưu trữ ISPRS (Tập 40, Số phát hành 1W2, trang 189–194). Hiệp hội quốc tế về quang trắc và viễn thám. https://www.scopus.com/inward/record.uri?eid=2-s2.0-848875632.
Hamylton, SM, Morris, RH, Carvalho, RC, Roder, N., Barlow, P., Mills, K., Wang, L. Đánh giá các kỹ thuật lập bản đồ thảm thực vật trên đảo từ máy bay không người lái
Hình ảnh phương tiện (UAV): Phân loại pixel, giải thích trực quan và phương pháp học máy. Int. J. Ứng dụng. Quan sát Trái đất. Geoinf. 89, 102085 https://doi.org/
10.1016/j.jag.2020.102085.
Haque, A., Islam, N., Samrat, NH, Dey, S., Ray, B., 2021. Nông nghiệp thông minh thông qua sự lãnh đạo có trách nhiệm ở Bangladesh: khả năng, cơ hội và hơn thế nữa.
Tính bền vững 13 (8), 4511.
Hardin, PJ, Hardin, TJ, 2010. Các phương tiện được điều khiển từ xa quy mô nhỏ trong nghiên cứu môi trường. La bàn Địa lý 4 (9), 1297–1311. ttps://doi.org/10.1111/j.1749-
8198.2010.00381.x.
Hardin, PJ, Jensen, RR, 2011. Máy bay không người lái quy mô nhỏ trong viễn thám môi trường: thách thức và cơ hội. GISci. Cảm biến từ xa 48 (1), 99–111. https://doi.org/10.2747/1548-1603.48.1.99.
He, Y., Nie, P., Zhang, Q., Liu, F., 2021. Internet vạn vật nông nghiệp: công nghệ và ứng dụng, (ấn bản đầu tiên năm 1). Mùa xuân.
Herwitz, SR, Johnson, LF, Dunagan, SE, Higgins, RG, Sullivan, DV, Zheng, J., Lobitz, BM, Leung, JG, Gallmeyer, BA, Aoyagi, M., Slye, RE, Brass, JA, 2004.
Hình ảnh từ máy bay không người lái: giám sát nông nghiệp và hỗ trợ quyết định. Máy tính. Điện tử. Nông nghiệp. 44 (1), 49–61. https://doi.org/10.1016/j.
compag.2004.02.006.
Holman, FH, Riche, AB, Michalski, A., Castle, M., Wooster, MJ, Hawkesford, MJ, Kiểu hình trường thông lượng cao về chiều cao và tốc độ tăng trưởng của cây lúa mì trong các thử nghiệm lô ruộng sử dụng viễn thám dựa trên UAV. Viễn thám 8 (12). https://doi. org/10.3390/rs8121031.
Honkavaara, E., Saari, H., Kaivosoja, J., Pol ¨ onen, ¨ I., Hakala, T., Litkey, P., M¨akynen, J., Pesonen, L., 2013. Xử lý và đánh giá hình ảnh lập thể, quang phổ được thu thập bằng máy ảnh quang phổ UAV hạng nhẹ dành cho nông nghiệp chính xác. Viễn thám 5 (10), 5006–5039. https://doi.org/10.3390/rs5105006.
Hossein Motlagh, N., Taleb, T., Arouk, O., 2016. Dịch vụ internet vạn vật dựa trên máy bay không người lái ở độ cao thấp: khảo sát toàn diện và triển vọng trong tương lai. IEEE Internet Things J. 3 (6), 899–922. https://doi.org/10.1109/JIOT.2016.2612119.
Hrabar, S., Sukhatme, GS, Corke, P., Usher, K., Roberts, J., 2005. Kết hợp luồng quang và điều hướng dựa trên âm thanh nổi của các hẻm núi đô thị cho UAV. Trong: 2005 IEEE/RSJ
Hội nghị quốc tế về robot và hệ thống thông minh, trang 3309–3316. https://doi.org/10.1109/IROS.2005.1544998.
Hsu, T.-C., Yang, H., Chung, Y.-C., Hsu, C.-H., 2020. Nền tảng nông nghiệp IoT sáng tạo dành cho điện toán sương mù đám mây. Duy trì. Máy tính. Thông tin Hệ thống. 28, 100285.
Huang, H., Deng, J., Lan, Y., Yang, A., Deng, X., Zhang, L., Gonzalez-Andujar, JL, 2018. Một mạng tích chập hoàn toàn để lập bản đồ cỏ dại cho máy bay không người lái ( hình ảnh UAV). XIN VUI LÒNG MỘT 13 (4), e0196302.
Huang, H., Lan, Y., Yang, A., Zhang, Y., Wen, S., Deng, J., 2020. Học sâu so với Phân tích hình ảnh dựa trên đối tượng (OBIA) trong lập bản đồ cỏ dại của hình ảnh UAV. Int. J.
Cảm biến từ xa 41 (9), 3446–3479. https://doi.org/10.1080/01431161.2019.1706112.
Huang, H., Yang, A., Tang, Y., Zhuang, J., Hou, C., Tan, Z., Dananjayan, S., He, Y., Guo, Q., Luo, S., 2021. Hiệu chỉnh màu sâu cho hình ảnh UAV trong giám sát cây trồng
sử dụng chuyển giao phong cách ngữ nghĩa với sự chú ý từ địa phương đến toàn cầu. Int. J. Ứng dụng. Quan sát Trái đất. Geoinf. 104, 102590 https://doi.org/10.1016/j.jag.2021.102590.
Huang, YB, Thomson, SJ, Hoffmann, WC, Lan, YB, Fritz, BK, 2013. Phát triển và triển vọng công nghệ máy bay không người lái phục vụ sản xuất nông nghiệp
sự quản lý. Int. J. Agric. Biol. Anh. 6 (3), 1–10. https://doi.org/10.3965/j. ijabe.20130603.001.
Huang, Y., Hoffmann, WC, Lan, Y., Wu, W., Fritz, BK, 2009. Phát triển hệ thống phun cho nền tảng máy bay không người lái. ứng dụng. Anh. Nông nghiệp. 25 (6), 803–809.
Hunt Jr., ER, Dean Hively, W., Fujikawa, SJ, Linden, DS, Daughtry, CST, McCarty, GW, 2010. Mua lại các bức ảnh kỹ thuật số NIR-lục-xanh từ
máy bay không người lái để theo dõi cây trồng. Viễn thám 2 (1), 290–305. https://doi. org/10.3390/rs2010290. Inoue, Y., 2020. Viễn thám về cây trồng và đất dựa trên vệ tinh và máy bay không người lái để phục vụ canh tác thông minh – một bài đánh giá. Khoa học đất. Dinh dưỡng thực vật. 66 (6), 798–810. https://doi.org/10.1080/00380768.2020.1738899.
Islam, N., Rashid, MM, Pasandideh, F., Ray, B., Moore, S., Kadel, R., 2021. Đánh giá về các ứng dụng và công nghệ truyền thông cho Internet of Things (IoT) và
Nông nghiệp thông minh bền vững dựa trên máy bay không người lái (UAV). Tính bền vững 13 (4), 1821. https://doi.org/10.3390/su13041821.
Jaud, M., Passot, S., Le Bivic, R., Delacourt, C., Grandjean, P., Le Dantec, N., 2016. Đánh giá độ chính xác của các mô hình bề mặt kỹ thuật số có độ phân giải cao được tính toán bởi
PhotoScan® và MicMac® trong điều kiện khảo sát dưới mức tối ưu. Viễn thám 8 (6), https://doi.org/10.3390/rs8060465.
Jim'enez-Brenes, FM, Lopez-Granados, ` F., Castro, AI, Torres-S' anchez, J., Serrano, N., Pena, ˜ JM, 2017. Định lượng tác động của việc cắt tỉa đối với cấu trúc cây ô liu và hàng năm tăng trưởng tán bằng cách sử dụng mô hình 3D dựa trên UAV. Phương pháp thực vật 13 (1). https://doi.org/10.1186/s13007-017-0205-3.
Jin, X., Liu, S., Baret, F., Hemerl'e, M., Comar, A., 2017. Ước tính mật độ thực vật của cây lúa mì khi xuất hiện từ hình ảnh UAV ở độ cao rất thấp. Cảm biến từ xa.
Môi trường. 198, 105–114. https://doi.org/10.1016/j.rse.2017.06.007.
Jinbo, C., Xiangliang, C., Han-Chi, F., Lam, A., 2019. Hệ thống giám sát sản phẩm nông nghiệp được hỗ trợ bởi điện toán đám mây. Máy tính cụm. 22 (4), 8929–8938.
Ju, C., & Sơn, HI 2018a. Đánh giá hiệu suất của nhiều hệ thống UAV cho viễn thám trong nông nghiệp. Kỷ yếu của Hội thảo về Tầm nhìn và Hành động của Robot trong Nông nghiệp tại Hội nghị Quốc tế về Robot và Tự động hóa của IEEE (ICRA), Brisbane, Australia, 21–26.
Ju, C., Sơn, HI, 2018b. Nhiều hệ thống UAV cho các ứng dụng nông nghiệp: kiểm soát, thực hiện và đánh giá. Điện tử 7 (9), 162. https://doi.org/10.3390/
điện tử7090162.
Jung, J., Maeda, M., Chang, A., Bhandari, M., Ashapure, A., Landivar-Bowles, J., 2021. Tiềm năng của viễn thám và trí tuệ nhân tạo là công cụ để cải thiện
khả năng phục hồi của hệ thống sản xuất nông nghiệp. Curr. Ý kiến. Công nghệ sinh học. 70, 15–22. https://doi.org/10.1016/j.copbio.2020.09.003.
Kalischuk, M., Paret, ML, Freeman, JH, Raj, D., Da Silva, S., Eubanks, S., Wiggins, DJ, Lollar, M., Marois, JJ, Mellinger, HC, Das, J. , 2019. Một kỹ thuật trinh sát cây trồng cải tiến kết hợp hình ảnh cây trồng đa quang phổ được hỗ trợ bằng máy bay không người lái vào thực hành trinh sát thông thường đối với bệnh bạc lá ở dưa hấu. Thực vật Dis. 103 (7), 1642–1650.
Kapoor, KK, Tamilmani, K., Rana, NP, Patil, P., Dwivedi, YK, Nerur, S., 2018. Những tiến bộ trong nghiên cứu truyền thông xã hội: quá khứ, hiện tại và tương lai. Thông báo. Hệ thống. Đằng trước. 20
(3), 531 – 558.
Kerkech, M., Hafiane, A., Canals, R., 2020. VddNet: mạng phát hiện bệnh cây nho dựa trên hình ảnh đa phổ và bản đồ độ sâu. Viễn thám 12 (20), 3305. https://doi. org/10.3390/rs12203305.
Khaliq, A., Comba, L., Biglia, A., Ricauda Aimonino, D., Chiaberge, M., Gay, P., 2019. So sánh hình ảnh đa quang phổ dựa trên vệ tinh và UAV cho vườn nho
đánh giá sự biến thiên. Viễn thám 11 (4). https://doi.org/10.3390/rs11040436.
Khan, PW, Byun, Y.-C., Park, N., 2020. Chuỗi khối IoT cho phép hệ thống xuất xứ được tối ưu hóa cho ngành công nghiệp thực phẩm 4.0 bằng cách sử dụng công nghệ học sâu nâng cao. Cảm biến 20 (10), 2990.
Khan, RU, Khan, K., Albattah, W., Qamar, AM, Ullah, F., 2021. Phát hiện bệnh thực vật dựa trên hình ảnh: từ học máy cổ điển đến hành trình học sâu. Cộng đồng không dây. Máy tính di động. 2021, 1–13.
Khan, S., Tufail, M., Khan, MT, Khan, ZA, Iqbal, J., Alam, M., Le, KNQ, 2021. Một khuôn khổ bán giám sát mới để phân loại cây trồng/cỏ dại dựa trên UAV. XIN VUI LÒNG MỘT 16 (5), e0251008.
Khanal, S., Fulton, J., Shearer, S., 2017. Tổng quan về các ứng dụng hiện tại và tiềm năng của viễn thám nhiệt trong nông nghiệp chính xác. Máy tính. Điện tử.
Nông nghiệp. 139, 22–32. https://doi.org/10.1016/j.compag.2017.05.001.
Khanna, A., Kaur, S., 2019. Sự phát triển của Internet vạn vật (IoT) và tác động đáng kể của nó trong lĩnh vực Nông nghiệp chính xác. Máy tính. Điện tử. Nông nghiệp. 157, 218–231.
Kim, W., Khan, GF, Wood, J., Mahmood, MT, 2016. Sự gắn kết của nhân viên đối với các tổ chức bền vững: phân tích từ khóa bằng cách sử dụng phân tích mạng xã hội và bùng nổ
phương pháp phát hiện. Tính bền vững 8(7), 631.
Kirsch, M., Lorenz, S., Zimmermann, R., Tusa, L., Mockel, ¨ R., Hodl, ¨ P., Booysen, R., Khodadadzadeh, M., Gloaguen, R., 2018. Tích hợp của mặt đất và máy bay không người lái
phương pháp cảm biến siêu phổ và quang trắc để lập bản đồ thăm dò và giám sát khai thác. Viễn thám 10 (9), 1366. https://doi.org/10.3390/
rs10091366.
Kitano, BT, Mendes, CCT, Geus, AR, Oliveira, HC, Souza, JR, 2019. Việc đếm cây ngô bằng cách sử dụng hình ảnh học sâu và máy bay không người lái. IEEE Geosci. Điều khiển từ xa Lett. 1–5 https://doi.org/10.1109/LGRS.2019.2930549.
Koh, JCO, Spangenberg, G., Kant, S., 2021. Máy học tự động để phân tích kiểu hình thực vật dựa trên hình ảnh thông lượng cao. Viễn thám 13 (5), 858. https://
doi.org/10.3390/rs13050858.
Kovalev, IV, Voroshilova, AA, 2020. Xu hướng công nghệ hiện đại trong việc phát triển hệ sinh thái máy bay không người lái chở hàng. J. Vật lý. Conf. Ser. 1515 (5), 052068 https://doi. org/10.1088/1742-6596/1515/5/052068.
Krul, S., Pantos, C., Frangulea, M., Valente, J., 2021. SLAM trực quan dành cho chăn nuôi và trồng trọt trong nhà bằng cách sử dụng máy bay không người lái nhỏ có camera một mắt: một nghiên cứu khả thi.
Máy bay không người lái 5 (2), 41. https://doi.org/10.3390/drones5020041.
Kulbacki, M., Segen, J., Knie'c, W., Klempous, R., Kluwak, K., Nikodem, J., Kulbacka, J., Serester, A., 2018. Khảo sát máy bay không người lái để tự động hóa nông nghiệp từ khi trồng đến
mùa gặt. Trong: INES 2018 - Hội nghị quốc tế lần thứ 22 của IEEE về Hệ thống kỹ thuật thông minh, trang 000353–358. https://doi.org/10.1109/INES.2018.8523943.
Lagkas, T., Argyriou, V., Bibi, S., Sarigiannidis, P., 2018. Các quan điểm và thách thức của khung UAV IoT: hướng tới việc bảo vệ máy bay không người lái như “Vật thể”. Cảm biến 18 (11), 4015. https://doi.org/10.3390/s18114015.
Laliberte, AS, Rango, A., 2011. Quy trình xử lý và phân loại hình ảnh để phân tích hình ảnh dưới decimet thu được bằng máy bay không người lái trên vùng đất khô cằn
vùng đất chăn thả. GISci. Cảm biến từ xa 48 (1), 4–23. https://doi.org/10.2747/1548-1603.48.1.4.
Laliberte, AS, Rango, A., Herrick, JE, 2007. Máy bay không người lái để lập bản đồ và giám sát vùng đất chăn nuôi: so sánh hai hệ thống. Kỷ yếu hội nghị thường niên ASPRS.
Lam, OHY, Dogotari, M., Prüm, M., Vithlani, HN, Roers, C., Melville, B., Zimmer, F., Becker, R., 2021. Quy trình làm việc nguồn mở để lập bản đồ cỏ dại ở đồng cỏ bản địa
sử dụng máy bay không người lái: Sử dụng Rumex obtusifolius làm trường hợp nghiên cứu. Euro. J.Remote Sens. 54 (sup1), 71–88. https://doi.org/10.1080/22797254.2020.1793687.
Lambert, DM, Lowenberg-DeBoer, J., Griffin, TW, Peone, J., Payne, T., Daberkow, SG, 2004. Áp dụng, lợi nhuận và sử dụng tốt hơn dữ liệu canh tác chính xác.
Giấy làm việc. Đại học Purdue. https://doi.org/10.22004/ag.econ.28615.
Lelong, CCD, Burger, P., Jubelin, G., Roux, B., Labb'e, S., Baret, F., 2008. Đánh giá hình ảnh máy bay không người lái để giám sát định lượng cây lúa mì trên các ô nhỏ. Cảm biến 8 (5), 3557–3585. https://doi.org/10.3390/s8053557.
Li, C., Niu, B., 2020. Thiết kế nông nghiệp thông minh dựa trên dữ liệu lớn và Internet vạn vật. Int. J. Phân phối. Cảm ơn.Netw. 16 (5) ttps://doi.org/10.1177/1550147720917065.
Li, W., Niu, Z., Chen, H., Li, D., Wu, M., Zhao, W., 2016. Ước tính từ xa về chiều cao tán và sinh khối trên mặt đất của ngô bằng hình ảnh nổi có độ phân giải cao từ một hệ thống máy bay không người lái chi phí thấp. Sinh thái. Ấn Độ 67, 637–648. https://doi.org/10.1016/j.ecolind.2016.03.036.
Liakos, KG, Busato, P., Moshou, D., Pearson, S., Bochtis, D., 2018. Học máy trong nông nghiệp: đánh giá. Cảm biến 18 (8), 2674.
Liebisch, F., Kirchgessner, N., Schneider, D., Walter, A., Hund, A., 2015. Phân tích kiểu hình từ xa, trên không của các đặc điểm ngô bằng phương pháp tiếp cận đa cảm biến di động. Phương pháp thực vật 11 (1), 9. https://doi.org/10.1186/s13007-015-0048-8.
Lin, Z., Guo, W., 2020. Phát hiện và đếm bông lúa miến bằng cách sử dụng hình ảnh hệ thống máy bay không người lái và học sâu. Đằng trước. Khoa học thực vật. 11.
Liu, S., Guo, L., Webb, H., Ya, X., Chang, X., 2019. Hệ thống giám sát Internet of Things của nông nghiệp sinh thái hiện đại dựa trên điện toán đám mây. Truy cập IEEE 7, 37050–37058.
Lopez-Granados, ` F., 2011. Phát hiện cỏ dại để quản lý cỏ dại ở từng địa điểm cụ thể: lập bản đồ và các phương pháp tiếp cận thời gian thực. Weed Res. 51 (1), 1–11. https://doi.org/10.1111/j.1365-3180.2010.00829.x.
Lopez-Granados, ` F., Torres-Sanchez, ` J., De Castro, A.-I., Serrano-P'erez, A., MesasCarrascosa, F.-J., Pena, ˜ J.-M. , 2016. Giám sát sớm dựa trên đối tượng về cỏ dại trên cây cỏ bằng hình ảnh UAV có độ phân giải cao. Agron. Duy trì. Dev. 36 (4), 1–12
Lopez-Granados, ` F., Torres-S` anchez, J., Serrano-P'erez, A., de Castro, AI, MesasCarrascosa, F.-J., Pena, ˜ J.-M., 2016. Lập bản đồ cỏ dại đầu mùa ở hoa hướng dương bằng công nghệ UAV: sự biến đổi của bản đồ xử lý thuốc diệt cỏ so với ngưỡng cỏ dại. Chính xác. Nông nghiệp. 17 (2), 183–199.
Lucieer, A., Malenovský, Z., Veness, T., Wallace, L., 2014. HyperUAS – quang phổ hình ảnh từ hệ thống máy bay không người lái đa cánh quạt. J. Field Rob. 31 (4),
571–590. https://doi.org/10.1002/rob.21508.
Lumme, J., Karjalainen, M., Kaartinen, H., Kukko, A., Hyyppa, ¨ J., Hyypp¨ a, H., Jaakkola, A., & Kleemola, J., 2008. Quét laser mặt đất của cây nông nghiệp. trong JJ
Chen J. Maas H–G. (Ed.), Cơ quan lưu trữ quốc tế về quang trắc, viễn thám và khoa học thông tin không gian—Lưu trữ ISPRS (Tập 37, trang 563–566).
Hiệp hội quốc tế về quang trắc và viễn thám. https://www.scopus .com/inward/record.uri?eid=2-s2.0-84919356328&partnerID=40&md5=574
b802131a99d16318ce619a01ca1bf.
Ma, L., Li, M., Ma, X., Cheng, L., Du, P., Liu, Y., 2017. Đánh giá về phân loại hình ảnh che phủ đất dựa trên đối tượng được giám sát. ISPRS J. Photogramm. Cảm biến từ xa 130,
277–293. https://doi.org/10.1016/j.isprsjprs.2017.06.001.
Maes, WH, Steppe, K., 2019. Quan điểm về viễn thám với máy bay không người lái trong nông nghiệp chính xác. Xu hướng khoa học thực vật. 24 (2), 152–164. https://doi.org/10.1016/j.tplants.2018.11.007.
Maimaitijiang, M., Ghulam, A., Sidike, P., Hartling, S., Maimaitiyiming, M., Peterson, K., Shavers, E., Fishman, J., Peterson, J., Kadam, S., Burken, J., Fritschi, F., 2017.
Kiểu hình đậu nành dựa trên hệ thống trên không không người lái (UAS) bằng cách sử dụng phản ứng tổng hợp dữ liệu đa cảm biến và máy học cực đoan. ISPRS J. Photogramm. Cảm biến từ xa 134, 43–58. https://doi.org/10.1016/j.isprsjprs.2017.10.011. Maimaitijiang, M., Sagan, V., Sidike, P., Daloye, AM, Erkbol, H., Fritschi, FB, 2020.
Giám sát cắt xén bằng cách sử dụng phản ứng tổng hợp dữ liệu vệ tinh/UAV và học máy. Viễn thám 12 (9), 1357. https://doi.org/10.3390/rs12091357.
Manfreda, S., McCabe, M., Miller, P., Lucas, R., Pajuelo Madrigal, V., Mallinis, G., Ben Dor, E., Helman, D., Estes, L., Ciraolo, G ., Müllerova, ` J., Tauro, F., de Lima, M., de
Lima, J., Tiếng Malta, A., Frances, F., Caylor, K., Kohv, M., Perks, M., Ruiz-P'erez, G., Su, Z., Vico, G., Toth , B., 2018. Về việc sử dụng hệ thống máy bay không người lái cho
kiểm soát môi trường. Viễn thám 10 (4), 641.
Marinko, RA, 1998. Trích dẫn các tạp chí nghiên cứu về phụ nữ trong luận án, 1989 và The Serials Librarian 35 (1–2), 29–44. https://doi.org/10.1300/J123v35n01_
03.
Masroor, R., Naeem, M., Ejaz, W., 2021. Quản lý tài nguyên trong mạng không dây có sự hỗ trợ của UAV: một góc nhìn tối ưu hóa. Mạng Ad Hoc. 121, 102596 https://doi.org/10.1016/j.adhoc.2021.102596.
Matese, A., Di Gennaro, SF, 2018. Các ứng dụng thực tế của nền tảng UAV đa cảm biến dựa trên hình ảnh đa phổ, nhiệt và RGB có độ phân giải cao một cách chính xác
nghề trồng nho. Nông nghiệp 8 (7), 116. https://doi.org/10.3390/agriculture8070116.
Matese, A., Di Gennaro, SF, 2021. Ngoài chỉ số NDVI truyền thống là yếu tố chính để áp dụng rộng rãi việc sử dụng UAV trong nghề trồng nho chính xác. Khoa học. Dân biểu 11 (1), 2721. https://doi.org/10.1038/s41598-021-81652-3.
Matese, A., Toscano, P., Di Gennaro, SF, Genesio, L., Vaccari, FP, Primicerio, J., Belli, C., Zaldei, A., Bianconi, R., Gioli, B., 2015 So sánh giữa UAV, máy bay.
và các nền tảng viễn thám vệ tinh cho nghề trồng nho chính xác. Viễn thám 7 (3), 2971–2990. https://doi.org/10.3390/rs70302971.
Mazzia, V., Comba, L., Khaliq, A., Chiaberge, M., Gay, P., 2020. Tinh chỉnh dựa trên máy bay và máy học của chỉ số thực vật được điều khiển bằng vệ tinh để có độ chính xác
nông nghiệp. Cảm biến 20 (9), 2530. https://doi.org/10.3390/s20092530.
McCain, KW, 1990. Tác giả lập bản đồ trong không gian trí tuệ: tổng quan về kỹ thuật. Mứt. Sóc. Thông tin. Khoa học. 41 (6), 433–443.
Meinen, BU, Robinson, DT, 2021. Lập mô hình xói mòn nông nghiệp: đánh giá ước tính xói mòn quy mô hiện trường của USLE và WEPP bằng cách sử dụng dữ liệu chuỗi thời gian của UAV. Môi trường. Modell. Phần mềm 137, 104962. https://doi.org/10.1016/j.envsoft.2021.104962.
Melville, B., Lucieer, A., Aryal, J., 2019. Phân loại các cộng đồng đồng cỏ bản địa vùng thấp bằng cách sử dụng Hình ảnh Hệ thống Máy bay Không người lái (UAS) siêu quang phổ trong
Vùng trung du Tasmania. Máy bay không người lái 3 (1), 5.
Messina, G., Modica, G., 2020. Ứng dụng hình ảnh nhiệt UAV trong nông nghiệp chính xác: công nghệ tiên tiến và triển vọng nghiên cứu trong tương lai. Viễn thám 12 (9), https://doi.org/10.3390/rs12091491.
Mishra, D., Luo, Z., Jiang, S., Papadopoulos, T., Dubey, R., 2017. Một nghiên cứu thư mục về dữ liệu lớn: khái niệm, xu hướng và thách thức. Quản lý quy trình kinh doanh. J. 23 (3),
555-573.
Mochida, K., Saisho, D., Hirayama, T., 2015. Cải tiến cây trồng bằng cách sử dụng bộ dữ liệu vòng đời thu được trong điều kiện đồng ruộng. Đằng trước. Khoa học thực vật. 6 https://doi.org/10.3389/
fpls.2015.00740.
Mogili, UM.R., Deepak, BBVL, 2018. Đánh giá ứng dụng hệ thống máy bay không người lái trong nông nghiệp chính xác. Máy tính thủ tục. Khoa học. 133, 502–509.
Moharana, S., Dutta, S., 2016. Sự biến đổi không gian của hàm lượng chất diệp lục và nitơ trong lúa từ hình ảnh siêu phổ. ISPRS J. Photogramm. Cảm biến từ xa 122, 17–29.
Muangprathub, J., Boonnam, N., Kajornkasirat, S., Lekbangpong, N., Wanichsombat, A.,
Nillaor, P., 2019. Phân tích dữ liệu nông nghiệp và IoT cho trang trại thông minh. Máy tính. Điện tử. Nông nghiệp. 156, 467–474.
Nansen, C., Elliott, N., 2016. Lập hồ sơ viễn thám và phản xạ trong côn trùng học. Annu. Linh mục Entomol. 61 (1), 139–158. https://doi.org/10.1146/annurev-ento010715-023834.
Navia, J., Mondragon, I., Patino, D., Colorado, J., 2016. Lập bản đồ đa quang phổ trong nông nghiệp: khảm địa hình bằng cách sử dụng máy bay không người lái XNUMX cánh tự động. Int. Conf.
Hệ thống máy bay không người lái (ICUAS) 2016, 1351–1358. https://doi.org/10.1109/ ICUAS.2016.7502606.
Nayyar, A., Nguyen, B.-L., Nguyen, NG, 2020. Internet của máy bay không người lái (Iodt): hình dung tương lai về máy bay không người lái thông minh. Khuyến cáo. Trí tuệ. Hệ thống. Máy tính. 1045, 563–580. https://doi.org/10.1007/978-981-15-0029-9_45.
Nebiker, S., Annen, A., Scherrer, M., Oesch, D., 2008. Cảm biến đa phổ trọng lượng nhẹ dành cho micro UAV—cơ hội cho viễn thám trên không có độ phân giải rất cao. Int. Vòm. Photogramm. Điều khiển từ xa Spat. Thông tin Khoa học 37 (B1), 1193–1200.
Negash, L., Kim, H.-Y., Choi, H.-L., 2019. Các ứng dụng UAV mới nổi trong nông nghiệp. Tại: Hội nghị quốc tế lần thứ 2019 năm 7 về Công nghệ trí tuệ robot và
Ứng dụng (RiTA), trang 254–257. https://doi.org/10.1109/RITAPP.2019.8932853.
Nerur, SP, Rasheed, AA, Natarajan, V., 2008. Cấu trúc trí tuệ của lĩnh vực quản lý chiến lược: phân tích đồng trích dẫn của tác giả. Chiến lược. Quản lý. J. 29 (3),
319-336.
Neupane, K., Baysal-Gurel, F., 2021. Tự động xác định và giám sát bệnh cây trồng bằng máy bay không người lái: đánh giá. Viễn thám 13 (19), 3841. https://doi.org/10.3390/rs13193841.
Nex, F., Remondino, F., 2014. UAV cho các ứng dụng bản đồ 3D: đánh giá. ứng dụng. Địa tin học 6 (1), 1–15. https://doi.org/10.1007/s12518-013-0120-x.
Niu, H., Hollenbeck, D., Zhao, T., Wang, D., Chen, Y., 2020. Ước tính lượng thoát hơi nước bằng thiết bị bay không người lái nhỏ trong nông nghiệp chính xác. Cảm biến 20 (22), 6427. https://
doi.org/10.3390/s20226427.
Osareh, F., 1996. Đo lường thư mục, Phân tích trích dẫn và Phân tích đồng trích dẫn. Tạp chí Văn học I 46 (3), 149–158. https://doi.org/10.1515/libr.1996.46.3.149.
P' adua, L., Vanko, J., Hruˇska, J., Ad˜ ao, T., Sousa, JJ, Peres, E., Morais, R., 2017. UAS, cảm biến và xử lý dữ liệu trong Nông lâm kết hợp: đánh giá hướng tới ứng dụng thực tế. Int. J. Viễn thám 38 (8–10), 2349–2391. https://doi.org/10.1080/01431161.2017.1297548.
Panday, US, Pratihast, AK, Aryal, J., Kayastha, RB, 2020. Đánh giá về các giải pháp dữ liệu dựa trên máy bay không người lái cho cây ngũ cốc. Máy bay không người lái 4 (3), 1–29. https://doi.org/10.3390/
máy bay không người lái4030041.
Parsaeian, M., Shahabi, M., Hassanpour, H., 2020. Ước tính hàm lượng dầu và protein trong hạt vừng bằng cách sử dụng xử lý hình ảnh và mạng lưới thần kinh nhân tạo. Mứt. Dầu
Hiệp hội các nhà hóa học 97 (7), 691–702.
Pena, ˜ JM, Torres-S'anchez, J., de Castro, AI, Kelly, M., Lopez-Granados, ` F., Suarez, O., Lập bản đồ cỏ dại trên các cánh đồng ngô đầu mùa bằng cách sử dụng phân tích dựa trên đối tượng của
Hình ảnh máy bay không người lái (UAV). XIN VUI LÒNG MỘT 8 (10), e77151.
P'erez-Ortiz, M., Pena, ‘JM, Guti'errez, PA, Torres-S' anchez, J., Herv' as-Martínez, C.,
Lopez-Granados, ` F., 2015. Một hệ thống bán giám sát để lập bản đồ cỏ dại ở cây hướng dương bằng máy bay không người lái và phương pháp phát hiện hàng cây trồng. ứng dụng. Máy tính mềm. J. 37, 533–544. https://doi.org/10.1016/j.asoc.2015.08.027.
Pincheira, M., Vecchio, M., Giaffreda, R., Kanhere, SS, 2021. Các thiết bị IoT tiết kiệm chi phí là nguồn dữ liệu đáng tin cậy cho hệ thống quản lý nước dựa trên blockchain trong nông nghiệp chính xác. Máy tính. Điện tử. Nông nghiệp. 180, 105889.
Popescu, D., Stoican, F., Stamatescu, G., Ichim, L., Dragana, C., 2020. Hệ thống UAV–WSN tiên tiến để giám sát thông minh trong nông nghiệp chính xác. Cảm biến 20 (3), https://doi.org/10.3390/s20030817.
Pournader, M., Shi, Y., Seuring, S., Koh, SL, 2020. Ứng dụng chuỗi khối trong chuỗi cung ứng, vận tải và hậu cần: tổng quan tài liệu một cách có hệ thống. Int. J. Sản phẩm. Res. 58 (7), 2063–2081.
Primicerio, J., Di Gennaro, SF, Fiorillo, E., Genesio, L., Lugato, E., Matese, A., Vaccari, FP, 2012. Một máy bay không người lái linh hoạt dành cho nông nghiệp chính xác.
Chính xác. Nông nghiệp. 13 (4), 517–523. https://doi.org/10.1007/s11119-012-9257-6.
Pritchard, A., 1969. Thư mục thống kê hoặc thư mục đo lường. J. Tài liệu. 25 (4), 348–349.
Pudelko, R., Stuczynski, T., Borzecka-Walker, M., 2012. Sự phù hợp của máy bay không người lái (UAV) để đánh giá các cánh đồng và cây trồng thí nghiệm. Nông nghiệp 99 (4), 431–436.
Puri, V., Nayyar, A., Raja, L., 2017. Máy bay không người lái trong nông nghiệp: một bước đột phá hiện đại trong nông nghiệp chính xác. J. Thống kê. Quản lý. Hệ thống. 20 (4), 507–518.
Radoglou-Grammatikis, P., Sarigiannidis, P., Lagkas, T., Moscholios, I., 2020. Tổng hợp các ứng dụng UAV cho nông nghiệp chính xác. Máy tính. Mạng. 172,
107148 https://doi.org/10.1016/j.comnet.2020.107148.
Ramesh, KV, Rakesh, V., Prakasa Rao, EVS, 2020. Ứng dụng phân tích dữ liệu lớn và trí tuệ nhân tạo trong nghiên cứu nông học. Ấn Độ J. Agron. 65 (4), 383–395.
Raparelli, E., Bajocco, S., 2019. Phân tích thư mục về việc sử dụng máy bay không người lái trong nghiên cứu nông lâm nghiệp. Int. J. Cảm biến từ xa 40 (24),
9070–9083. https://doi.org/10.1080/01431161.2019.1569793.
Rasmussen, J., Nielsen, J., Garcia-Ruiz, F., Christensen, S., Streibig, JC, Lotz, B., 2013.
Tiềm năng sử dụng hệ thống máy bay không người lái nhỏ (UAS) trong nghiên cứu cỏ dại. Weed Res. 53 (4), 242–248.
Rasmussen, J., Ntakos, G., Nielsen, J., Svensgaard, J., Poulsen, RN, Christensen, S., Là các chỉ số thực vật được lấy từ máy ảnh cấp tiêu dùng được gắn trên
UAV có đủ tin cậy để đánh giá các lô thí nghiệm? Euro. J. Agron. 74, 75–92. https://doi.org/10.1016/j.eja.2015.11.026.
Rejeb, A., Rejeb, K., Abdollahi, A., Zailani, S., Iranmanesh, M., Ghobakhloo, M., 2022. Số hóa trong chuỗi cung ứng thực phẩm: đánh giá thư mục và lộ trình chính
Phân tích. Tính bền vững 14 (1), 83. https://doi.org/10.3390/su14010083.
Rejeb, A., Rejeb, K., Simske, SJ, Treiblmaier, H., 2021a. Máy bay không người lái để quản lý chuỗi cung ứng và hậu cần: chương trình đánh giá và nghiên cứu. Int. J. Nhà hậu cần. Res. ứng dụng.
1–24. https://doi.org/10.1080/13675567.2021.1981273.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021b. Công nghệ chuỗi khối trong hậu cần và quản lý chuỗi cung ứng: đánh giá thư mục. Hậu cần 5(4), 72.
https://doi.org/10.3390/logistics5040072.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021c. Máy bay không người lái nhân đạo: một chương trình đánh giá và nghiên cứu. Internet vạn vật 16, 100434. https://doi.org/10.1016/j.
iot.2021.100434.
Rejeb, A., Treiblmaier, H., Rejeb, K., Zailani, S., 2021d. Nghiên cứu chuỗi khối trong chăm sóc sức khỏe: đánh giá thư mục và xu hướng nghiên cứu hiện tại. J. của Dữ liệu, Inf. Và
Quản lý. 3 (2), 109–124.
Rejeb, A., Simske, S., Rejeb, K., Treiblmaier, H., Zailani, S., 2020. Nghiên cứu Internet of Things trong quản lý chuỗi cung ứng và hậu cần: phân tích đo lường thư mục. Internet
của Điều 12, 100318.
ReportLinker, 2021. Thị trường máy bay không người lái trong nông nghiệp toàn cầu sẽ đạt 15.2 tỷ USD vào năm Phòng tin tứcGlobeNewswire. https://www.globenewswire.com/news-release/2021/08/10/2277986/0/en/Global-Agriculture-Drones-Market-to-Reach-US-15-2-Billion-by-the- Năm-2027.html.
Ribeiro-Gomes, K., Hernandez-L ` opez, ` D., Ortega, JF, Ballesteros, R., Poblete, T.,Moreno, MA, 2017. Hiệu chỉnh và tối ưu hóa máy ảnh nhiệt không làm mát của
Quy trình quang trắc ứng dụng UAV trong nông nghiệp. Cảm biến (Thụy Sĩ) 17 (10). https://doi.org/10.3390/s17102173.
Rivera, MA, Pizam, A., 2015. Những tiến bộ trong nghiên cứu khách sạn: “Từ Rodney Dangerfield đến Aretha Franklin”. Int. J. Đương thời. Bệnh viện. Quản lý. 27 (3),
362–378. https://doi.org/10.1108/IJCHM-03-2014-0146.
Roldan, ´ JJ, Joossen, G., Sanz, D., Del Cerro, J., Barrientos, A., 2015. Hệ thống cảm biến dựa trên Mini-UAV để đo các biến số môi trường trong nhà kính. Cảm biến 15 (2), 3334–3350. https://doi.org/10.3390/s150203334.
Rozenberg, G., Kent, R., Blank, L., 2021. UAV cấp độ người tiêu dùng được sử dụng để phát hiện và phân tích các mô hình phân bố không gian của cỏ dại cuối mùa trên các cánh đồng hành tây thương mại. Chính xác. Nông nghiệp. 22 (4), 1317–1332. https://doi.org/10.1007/s11119-021-09786-y.
Saari, H., Pellikka, I., Pesonen, L., Tuominen, S., Heikkila, ¨ J., Holmlund, C., Makynen, ¨ J., Ojala, K., Antila, T., 2011. Không người lái Hệ thống camera quang phổ vận hành bằng phương tiện trên không (UAV) dành cho các ứng dụng lâm nghiệp và nông nghiệp. Tiếp tục. SPIE – Int. Sóc. Opt. Anh. 8174 https://doi.org/10.1117/12.897585.
Sah, B., Gupta, R., Bani-Hani, D., 2021. Phân tích các rào cản trong việc triển khai hậu cần bằng máy bay không người lái. Int. J. Nhà hậu cần. Res. ứng dụng. 24 (6), 531–550. https://doi.org/10.1080/
13675567.2020.1782862.
Saha, AK, Saha, J., Ray, R., Sircar, S., Dutta, S., Chattopadhyay, SP, & Saha, HN, máy bay không người lái dựa trên IOT để cải thiện chất lượng cây trồng trong lĩnh vực nông nghiệp. Ở SH
N. Chakrabarti S. (Ed.), Hội thảo và Hội nghị về Điện toán và Truyền thông Thường niên lần thứ 2018 của IEEE năm 8, CCWC 2018 (Tập 2018-Tháng 612, trang 615–XNUMX). học viện
của Công ty Kỹ sư Điện và Điện tử doi: 10.1109/CCWC.2018.8301662.
Sai Vineeth, KV, Vara Prasad, YR, Dubey, SR, Venkataraman, H., 2019. LEDCOM: hệ thống truyền thông dựa trên đèn LED mới và hiệu quả cho nông nghiệp chính xác. Hội nghị IEEE Thông tin. Cộng đồng. Technol. 2019, 1–5. https://doi.org/10.1109/CICT48419.2019.9066177.
Salamí, E., Barrado, C., Pastor, E., 2014. Các thí nghiệm bay bằng UAV áp dụng cho viễn thám các khu vực có thảm thực vật. Viễn thám 6 (11), 11051–11081. https://doi.org/10.3390/rs61111051.
Sankaran, S., Khot, LR, Espinoza, CZ, Jarolmasjed, S., Sathuvalli, VR, Vandemark, GJ, Miklas, PN, Carter, AH, Pumphrey, MO, Knowles, NRN, Pavek, MJ, 2015.
Các hệ thống hình ảnh trên không có độ phân giải cao, độ cao thấp để xác định kiểu hình cây trồng theo hàng và trên cánh đồng: một đánh giá. Euro. J. Agron. 70, 112–123. https://doi.org/10.1016/j.
eja.2015.07.004.
Santesteban, LG, Di Gennaro, SF, Herrero-Langreo, A., Miranda, C., Royo, JB, Matese, A., 2017. Hình ảnh nhiệt dựa trên UAV có độ phân giải cao để ước tính
sự thay đổi tức thời và theo mùa của tình trạng nước thực vật trong vườn nho. Nông nghiệp. Quản lý nước. 183, 49–59. https://doi.org/10.1016/j.agwat.2016.08.026.
Sarli, CC, Dubinsky, EK, Holmes, KL, 2010. Ngoài phân tích trích dẫn: Một mô hình đánh giá tác động của nghiên cứu. J. Med. Thư viện PGS.TS. : JMLA 98 (1), 17–23. https://doi.org/10.3163/1536-5050.98.1.008.
Schaepman, ME, Ustin, SL, Plaza, AJ, Painter, TH, Verrelst, J., Liang, S., 2009. Quang phổ hình ảnh liên quan đến khoa học hệ thống trái đất—một đánh giá. Cảm biến từ xa.Môi trường. 113, S123–S137.
Schirrmann, M., Giebel, A., Gleiniger, F., Pflanz, M., Lentschke, J., Dammer, K.-H., 2016. Giám sát các thông số nông học của cây lúa mì mùa đông bằng thiết bị bay không người lái chi phí thấp
hình ảnh. Viễn thám 8 (9). https://doi.org/10.3390/rs8090706.
Schmale III, DG, Dingus, BR, Reinholtz, C., 2008. Phát triển và ứng dụng máy bay không người lái tự động để lấy mẫu sinh học chính xác ở trên
lĩnh vực nông nghiệp. J. Field Rob. 25 (3), 133–147. https://doi.org/10.1002/rob.20232.
Shadrin, D., Menshchikov, A., Somov, A., Bornemann, G., Hauslage, J., Fedorov, M.,
Kích hoạt nông nghiệp chính xác thông qua cảm biến nhúng với trí tuệ nhân tạo IEEE Trans. Nhạc cụ. Đo. 69 (7), 4103–4113.
Shakhatreh, H., Sawalmeh, AH, Al-Fuqaha, A., Dou, Z., Almaita, E., Khalil, I.,
Othman, NS, Khreishah, A., Guizani, M., 2019. Máy bay không người lái (UAV): khảo sát về các ứng dụng dân dụng và những thách thức nghiên cứu chính. Truy cập IEEE 7,
48572–48634. https://doi.org/10.1109/ACCESS.2019.2909530.
Shakoor, N., Northrup, D., Murray, S., Mockler, TC, 2019. Nông nghiệp dựa trên dữ liệu lớn: phân tích dữ liệu lớn trong nhân giống cây trồng, gen và sử dụng viễn thám
công nghệ để nâng cao năng suất cây trồng. Hiện tượng thực vật J. 2 (1), 1–8.
Sharma, BK, Chandra, G., Mishra, VP, 2019. Phân tích so sánh và ý nghĩa của UAV và AI trong Điều tra pháp y. Trong: Kỷ yếu – 2019 Amity International
Hội thảo về Trí tuệ nhân tạo. https://doi.org/10.1109/AICAI.2019.8701407.
Sharma, R., Shishodia, A., Gunasekaran, A., Min, H., Munim, ZH, 2022. Vai trò của trí tuệ nhân tạo trong quản lý chuỗi cung ứng: lập bản đồ lãnh thổ. Int. J.
Sản phẩm. Res. 1–24. https://doi.org/10.1080/00207543.2022.2029611.
Shi, Y., Thomasson, JA, Murray, SC, Pugh, NA, Rooney, WL, Shafian, S., Rajan, N., Rouze, G., Morgan, CLS, Neely, HL, Rana, A., Bagavathiannan , MV,
Henrickson, J., Bowden, E., Valasek, J., Olsenholler, J., Bishop, MP, Sheridan, R., Putman, EB, Popescu, S., Burks, T., Cope, D., Ibrahim, A., McCutchen, BF,
Baltensperger, DD, Avant, RV, Vidrine, M., Yang, C., Zhang, J., 2016. Máy bay không người lái để nghiên cứu kiểu hình và nông học hiệu suất cao. XIN MỘT
11 (7), e0159781.
Shuai, G., Martinez-Feria, RA, Zhang, J., Li, S., Price, R., Basso, B., 2019. Nắm bắt tính không đồng nhất của cây ngô giữa các vùng ổn định năng suất bằng cách sử dụng Máy bay không người lái
Phương tiện (UAV). Cảm biến 19 (20), 4446. https://doi.org/10.3390/s19204446.
Small, H., 1973. Đồng trích dẫn trong tài liệu khoa học: thước đo mới về mối quan hệ giữa hai tài liệu. Mứt. Sóc. Thông tin. Khoa học. 24 (4), 265–269.
Small, H., Rorvig, ME, Lunin, LF, 1999. Trực quan hóa khoa học bằng ánh xạ trích dẫn. Mứt. Sóc. Thông tin. Khoa học. 50 (9), 799–813.
Soares, VHA, Ponti, MA, Gonçalves, RA, Campello, RJGB, 2021. Đếm gia súc trong tự nhiên bằng hình ảnh trên không được định vị địa lý trên các khu vực đồng cỏ rộng lớn. Máy tính. Điện tử. Nông nghiệp. 189, 106354 https://doi.org/10.1016/j.compag.2021.106354.
Srivastava, K., Pandey, PC, Sharma, JK, 2020. Phương pháp tối ưu hóa tuyến đường trong các ứng dụng nông nghiệp chính xác sử dụng UAV. Máy bay không người lái 4 (3), 58. https://doi.org/ 10.3390/drones4030058.
Stafford, JV, 2000. Thực hiện nông nghiệp chính xác trong thế kỷ 21. J. Agric. Anh. Res. 76 (3), 267–275.
Su, J., Coombes, M., Liu, C., Guo, L., Chen, W.-H., 2018. Đánh giá hạn hán lúa mì bằng hình ảnh viễn thám sử dụng máy bay không người lái. Hội nghị kiểm soát Trung Quốc lần thứ 2018 (CCC) năm 37
Su, J., Liu, C., Coombes, M., Hu, X., Wang, C., Xu, X., Li, Q., Guo, L., Chen, W.-H., 2018. Giám sát bệnh gỉ sắt màu vàng lúa mì bằng cách học hỏi từ hình ảnh trên không UAV đa quang phổ.
Máy tính. Điện tử. Nông nghiệp. 155, 157–166. https://doi.org/10.1016/j. compag.2018.10.017.
Su, Y., Wang, X., 2021. Đổi mới quản lý kinh tế nông nghiệp trong quá trình xây dựng nền nông nghiệp thông minh bằng dữ liệu lớn. Máy tính bền vững. Thông tin Hệ thống. 31, 100579 https://doi.org/10.1016/j.suscom.2021.100579.
Sullivan, DG, Fulton, JP, Shaw, JN, Bland, GL, 2007. Đánh giá độ nhạy của hệ thống máy bay hồng ngoại nhiệt không người lái để phát hiện căng thẳng về nước trong tán bông. Dịch. ASABE 50 (6), 1955–1962.
Sumesh, KC, Ninsawat, S., Som-ard, J., 2021. Tích hợp chỉ số thực vật dựa trên RGB, mô hình bề mặt cây trồng và phương pháp phân tích hình ảnh dựa trên đối tượng để ước tính năng suất mía bằng máy bay không người lái. Máy tính. Điện tử. Nông nghiệp. 180, 105903 https://doi.org/10.1016/j.compag.2020.105903.
Suomalainen, J., Anders, N., Iqbal, S., Franke, J., Wenting, P., Bartholomeus, H., Becker, R., Kooistra, L., 2013. Một hệ thống ánh xạ siêu phổ trọng lượng nhẹ cho
máy bay không người lái - những kết quả đầu tiên Trong: Hội thảo lần thứ 2013 năm 5 về Xử lý tín hiệu và hình ảnh siêu phổ: Sự phát triển trong viễn thám (WHISPERS), trang 1–4. https://doi.org/10.1109/WHISPERS.2013.8080721.
Suomalainen, J., Anders, N., Iqbal, S., Roerink, G., Franke, J., Wenting, P., Hünniger, D., Bartholomeus, H., Becker, R., Kooistra, L., 2014. Siêu quang phổ nhẹ
hệ thống bản đồ và dây chuyền xử lý ảnh chụp cho máy bay không người lái. Viễn thám 6 (11), 11013–11030. https://doi.org/10.3390/
rs61111013.
Syeda, IH, Alam, MM, Illahi, U., Su'ud, MM, 2021. Chiến lược kiểm soát nâng cao sử dụng xử lý hình ảnh, UAV và AI trong nông nghiệp: Đánh giá. Thế giới J. Eng. 18 (4),
579–589. https://doi.org/10.1108/WJE-09-2020-0459.
Tahai, A., Rigsby, JT, 1998. Xử lý thông tin bằng cách sử dụng các trích dẫn để điều tra ảnh hưởng của tạp chí trong kế toán. Thông tin Quá trình. Quản lý. 34 (2–3), 341–359.
Tang, Y., Dananjayan, S., Hou, C., Guo, Q., Luo, S., He, Y., 2021. Một cuộc khảo sát về mạng 5G và tác động của nó đối với nông nghiệp: thách thức và cơ hội. Máy tính.
Điện tử. Nông nghiệp. 180, 105895 https://doi.org/10.1016/j.compag.2020.105895.
Tantalaki, N., Souravlas, S., Roumeliotis, M., 2019. Ra quyết định dựa trên dữ liệu trong nông nghiệp chính xác: sự trỗi dậy của dữ liệu lớn trong hệ thống nông nghiệp. J. Agric. Thông tin thực phẩm.
20 (4), 344 trận380.
Tao, H., Feng, H., Xu, L., Miao, M., Yang, G., Yang, X., Fan, L., 2020. Ước tính năng suất và chiều cao cây của lúa mì mùa đông bằng UAV- dựa trên hình ảnh siêu phổ.
Cảm biến 20 (4), 1231.
Techy, L., Schmale III, DG, Woolsey, CA, 2010. Lấy mẫu sinh vật học phối hợp của mầm bệnh thực vật ở tầng khí quyển thấp hơn bằng cách sử dụng hai máy bay không người lái tự động. J. Field Rob. 27 (3), 335–343. https://doi.org/10.1002/rob.20335.
Tetila, EC, Machado, BB, Astolfi, G., Belete, NAdS, Amorim, WP, Roel, AR, Pistori, H., 2020. Phát hiện và phân loại sâu bệnh đậu tương bằng phương pháp học sâu
với hình ảnh UAV. Máy tính. Điện tử. Nông nghiệp. 179, 105836.
Thamm, H.-P., Menz, G., Becker, M., Kuria, DN, Misana, S., Kohn, D., 2013. Việc sử dụng Uas để đánh giá các hệ thống nông nghiệp ở vùng đất ngập nước AN ở Tanzania ở— Và WetSeason cho nông nghiệp bền vững và cung cấp dữ liệu cơ bản cho dữ liệu Terra-Sar X. Trong: ISPRS – Cơ quan lưu trữ quốc tế về quang trắc, viễn thám và khoa học thông tin không gian, trang 401–406. https://doi.org/10.5194/isprsarchivesXL-1-W2-401-2013.
Thelwall, M., 2008. Thư mục đến trắc lượng web. J. Thông tin. Khoa học. 34 (4), 605–621.
Torres-Sanchez, ` J., Lopez-Granados, ` F., Pena, ˜ JM, 2015. Một phương pháp dựa trên đối tượng tự động để xác định ngưỡng tối ưu trong hình ảnh UAV: ứng dụng để phát hiện thảm thực vật ở cây thân thảo. Máy tính. Điện tử. Nông nghiệp. 114, 43–52. https://doi.org/10.1016/j.compag.2015.03.019.
Torres-Sanchez, ` J., Lopez-Granados, ` F., Serrano, N., Arquero, O., Pena, ˜ JM, Hassan, QK, 2015. Giám sát 3-D hiệu suất cao các đồn điền trồng cây nông nghiệp với Công nghệ máy bay không người lái (UAV). XIN VUI LÒNG MỘT 10 (6), e0130479.
Torres-Sanchez, ` J., Pena, ˜ JM, de Castro, AI, Lopez-Granados, ` F., 2014. Lập bản đồ đa thời gian về phần thực vật trên các cánh đồng lúa mì đầu mùa bằng cách sử dụng hình ảnh từ UAV. Máy tính. Điện tử. Nông nghiệp. 103, 104–113. https://doi.org/10.1016/j. compag.2014.02.009.
Tsouros, DC, Bibi, S., Sarigiannidis, PG, 2019. Đánh giá về các ứng dụng dựa trên UAV cho nông nghiệp chính xác. Thông tin (Thụy Sĩ) 10 (11). https://doi.org/10.3390/info10110349.
Tu, Y.-H., Phinn, S., Johansen, K., Robson, A., Wu, D., 2020. Tối ưu hóa kế hoạch bay bằng máy bay không người lái để đo cấu trúc cây trồng làm vườn. ISPRS J. Photogramm.
Cảm biến từ xa 160, 83–96. https://doi.org/10.1016/j.isprsjprs.2019.12.006
Tzounis, A., Katsoulas, N., Bartzanas, T., Kittas, C., 2017. Internet of Things trong nông nghiệp, những tiến bộ gần đây và những thách thức trong tương lai. Hệ thống sinh học. Anh. 164, 31–48.
https://doi.org/10.1016/j.biosystemseng.2017.09.007.
Uddin, A., Singh, VK, Pinto, D., Olmos, I., 2015. Lập bản đồ khoa học về nghiên cứu khoa học máy tính ở Mexico. Khoa học lượng học 105 (1), 97–114.
UN., 2019. Triển vọng dân số thế giới 2019. https://population.un.org/wpp/ (Truy cập ngày 15/04/2022).
Uto, K., Seki, H., Saito, G., Kosugi, Y., 2013. Đặc điểm của cánh đồng lúa bằng hệ thống cảm biến siêu phổ thu nhỏ gắn trên UAV. IEEE J. Sel. Đứng đầu. ứng dụng. Quan sát Trái đất.
Cảm biến từ xa 6 (2), 851–860. https://doi.org/10.1109/JSTARS.2013.2250921. van der Merwe, D., Burchfield, DR, Witt, TD, Price, KP, Sharda, A., 2020. Máy bay không người lái ở
nông nghiệp. Khuyến cáo. Agron. 162, 1–30.
Velusamy, P., Rajendran, S., Mahendran, RK, Naseer, S., Shafiq, M., Choi, J.-G., 2022.
Máy bay không người lái (UAV) trong nông nghiệp chính xác: ứng dụng và thách thức. Năng lượng 15 (1), 217. https://doi.org/10.3390/en15010217.
Ventura, D., Bonifazi, A., Gravina, MF, Belluscio, A., Ardizzone, G., 2018. Lập bản đồ và phân loại các môi trường sống biển nhạy cảm về mặt sinh thái bằng cách sử dụng Máy bay không người lái
Hình ảnh phương tiện (UAV) và Phân tích hình ảnh dựa trên đối tượng (OBIA). Viễn thám 10 (9), 1331. https://doi.org/10.3390/rs10091331.
Verger, A., Vigneau, N., Ch'eron, C., Gilliot, J.-M., Comar, A., Baret, F., 2014. Chỉ số diện tích xanh từ hệ thống máy bay không người lái trên cây lúa mì và hạt cải dầu . Cảm biến từ xa.Môi trường. 152, 654–664. https://doi.org/10.1016/j.rse.2014.06.006.
Von Bueren, SK, Burkart, A., Hueni, A., Rascher, U., Tuohy, MP, Yule, IJ, 2015. Triển khai bốn cảm biến quang học dựa trên UAV trên đồng cỏ: thách thức và
những hạn chế. Khoa học sinh học 12 (1), 163–175. https://doi.org/10.5194/bg-12-163-2015.
Vuran, MC, Salam, A., Wong, R., Irmak, S., 2018. Internet của những thứ ngầm trong nông nghiệp chính xác: các khía cạnh kiến trúc và công nghệ. Mạng Ad Hoc. 81,
160–173. https://doi.org/10.1016/j.adhoc.2018.07.017.
Wamba, SF, Queiroz, MM, 2021. Trí tuệ nhân tạo có trách nhiệm như một thành phần bí mật cho sức khỏe kỹ thuật số: phân tích trắc lượng thư mục, hiểu biết chuyên sâu và hướng nghiên cứu.
Thông tin. Hệ thống. Đằng trước. 1–16.
Wang, L., Zhang, G., Wang, Z., Liu, J., Shang, J., Liang, L., 2019. Phân tích thư mục về xu hướng nghiên cứu viễn thám trong theo dõi tăng trưởng cây trồng: Một nghiên cứu trường hợp ở Trung Quốc. Viễn thám 11 (7). https://doi.org/10.3390/rs11070809.
White, HD, Griffith, BC, 1981. Trích dẫn của tác giả: Một thước đo văn học về cấu trúc trí tuệ. Mứt. Sóc. Thông tin. Khoa học. 32 (3), 163–171.
Xiang, H., Tian, L., 2011. Phát triển hệ thống viễn thám nông nghiệp chi phí thấp dựa trên máy bay không người lái tự động (UAV). Hệ thống sinh học. Anh. 108 (2), 174–190. https://doi.org/10.1016/j.biosystemseng.2010.11.010.
Xie, C., Yang, C., 2020. Đánh giá về các đặc điểm kiểu hình năng suất cao của thực vật sử dụng cảm biến dựa trên UAV. Máy tính. Điện tử. Nông nghiệp. 178, 105731 https://doi.org/10.1016/j.
compag.2020.105731.
Yao, H., Qin, R., Chen, X., 2019. Máy bay không người lái cho các ứng dụng viễn thám—một bài đánh giá. Viễn thám 11 (12). https://doi.org/10.3390/
rs11121443.
Yeom, S., 2021. Di chuyển theo dõi mọi người và loại bỏ dấu vết sai bằng hình ảnh nhiệt hồng ngoại bằng máy đa năng. Máy bay không người lái 5 (3), 65. https://doi.org/10.3390/drones5030065.
Yue, J., Feng, H., Jin, X., Yuan, H., Li, Z., Chu, C., Yang, G., Tian, Q., 2018. So sánh ước tính thông số cây trồng bằng hình ảnh từ gắn trên UAV
cảm biến siêu quang ảnh chụp nhanh và máy ảnh kỹ thuật số độ phân giải cao. Viễn thám 10 (7), 1138. https://doi.org/10.3390/rs10071138.
Yue, J., Yang, G., Li, C., Li, Z., Wang, Y., Feng, H., Xu, B., 2017. Ước tính sinh khối trên mặt đất của lúa mì mùa đông bằng máy bay không người lái- ảnh chụp nhanh dựa trên
cảm biến siêu phổ và mô hình cải tiến chiều cao cây trồng. Viễn thám 9 (7). https://doi.org/10.3390/rs9070708.
Zahawi, RA, Dandois, JP, Holl, KD, Nadwodny, D., Reid, JL, Ellis, EC, 2015. Sử dụng máy bay không người lái hạng nhẹ để theo dõi quá trình phục hồi rừng nhiệt đới. Biol.
Bảo tồn. 186, 287–295. https://doi.org/10.1016/j.biocon.2015.03.031. Zamora-Izquierdo, MA, Santa, J., Martínez, JA, Martínez, V., Skarmeta, AF, 2019.
Nền tảng IoT nông nghiệp thông minh dựa trên điện toán biên và đám mây. Hệ thống sinh học. Anh. 177,
4-17.
Zarco-Tejada, PJ, Diaz-Varela, R., Angileri, V., Loudjani, P., 2014. Định lượng chiều cao cây bằng hình ảnh có độ phân giải rất cao thu được từ máy bay không người lái
phương tiện (UAV) và phương pháp tái tạo ảnh 3D tự động. Euro. J. Agron. 55, 89–99. https://doi.org/10.1016/j.eja.2014.01.004.
Zhang, C., Craine, WA, McGee, RJ, Vandemark, GJ, Davis, JB, Brown, J., Hulbert, SH, Sankaran, S., 2020. Kiểu hình dựa trên hình ảnh về cường độ ra hoa ở các loại cây trồng mùa mát. Cảm biến 20 (5), 1450. https://doi.org/10.3390/s20051450.
Zhang, C., Kovacs, JM, 2012. Ứng dụng hệ thống máy bay không người lái nhỏ cho nông nghiệp chính xác: đánh giá. Chính xác. Nông nghiệp. 13 (6), 693–712. https://doi.org/
10.1007/s11119-012-9274-5.
Zhang, L., Zhang, H., Niu, Y., Han, W., 2019. Lập bản đồ căng thẳng nước ở ngô dựa trên viễn thám đa phổ UAV. Viễn thám 11(6), 605.
Zhang, X., Han, L., Dong, Y., Shi, Y., Huang, W., Han, L., Gonz' alez-Moreno, P., Ma, H., Ye, H., Sobeih , T., 2019. Phương pháp tiếp cận dựa trên deep learning đối với bệnh gỉ sắt tự động
phát hiện bệnh từ hình ảnh UAV siêu phổ có độ phân giải cao. Viễn thám 11(13), 1554.
Zhao, X., Zhang, J., Huang, Y., Tian, Y., Yuan, L., 2022. Phát hiện và phân biệt bệnh và stress côn trùng trên cây chè bằng cách sử dụng hình ảnh siêu phổ kết hợp với phân tích sóng con. Máy tính. Điện tử. Nông nghiệp. 193, 106717 https://doi.org/10.1016/j. compag.2022.106717.
Zheng, A., Wang, M., Li, C., Tang, J., Luo, B., 2022. Thích ứng miền đối nghịch được hướng dẫn bằng Entropy để phân đoạn ngữ nghĩa hình ảnh trên không. IEEE Trans. G
Zheng, H., Cheng, T., Yao, X., Deng, X., Tian, Y., Cao, W., Zhu, Y., 2016. Phát hiện hiện tượng học cây lúa thông qua phân tích chuỗi thời gian của quang phổ trên mặt đất dữ liệu chỉ mục. Res cây trồng trên đồng ruộng. 198, 131–139. https://doi.org/10.1016/j.fcr.2016.08.027.
Zheng, J., Yang, W., 2018. Thiết kế hệ thống gieo hạt rò rỉ nông nghiệp chính xác dựa trên cảm biến không dây. Int. J. Trực tuyến Eng. 14 (05), 184.
Chu, L., Gu, X., Cheng, S., Yang, G., Shu, M., Sun, Q., 2020. Phân tích sự thay đổi chiều cao cây của ngô trồng bằng dữ liệu UAV-LiDAR. Nông nghiệp 10 (5), 146. https://
doi.org/10.3390/agriculture10050146.
Chu, S., Chai, X., Yang, Z., Wang, H., Yang, C., Sun, T., 2021. Ngô-IAS: Một phần mềm phân tích hình ảnh ngô sử dụng phương pháp học sâu để phân tích kiểu hình thực vật hiệu suất cao . Phương pháp thực vật 17 (1), 48. https://doi.org/10.1186/s13007-021-00747-0.
Chu, X., Zheng, HB, Xu, XQ, He, JY, Ge, XK, Yao, X., Cheng, T., Zhu, Y., Cao, WX, Tian, YC, 2017. Dự đoán năng suất hạt ở lúa sử dụng thảm thực vật đa thời gian
chỉ số từ hình ảnh kỹ thuật số và đa phổ dựa trên UAV. ISPRS J. Photogramm. Cảm biến từ xa 130, 246–255. https://doi.org/10.1016/j.isprsjprs.2017.05.003.
Chu, Y., Xie, Y., Shao, L., 2016. Mô phỏng công nghệ cốt lõi của hệ thống giám sát nhà kính dựa trên mạng cảm biến không dây. Int. J. Trực tuyến Eng. 12 (05),
43.
Chu, Z., Majeed, Y., Diverres Naranjo, G., Gambacorta, EMT, 2021. Đánh giá căng thẳng về nước cho cây trồng bằng hình ảnh nhiệt hồng ngoại trong nông nghiệp chính xác: đánh giá
và triển vọng tương lai cho các ứng dụng học sâu. Máy tính. Điện tử. Nông nghiệp. 182, 106019 https://doi.org/10.1016/j.compag.2021.106019.

{kind=link}